ATmega 128
- 마이크로 컨트롤러
* 마이크로 컨트롤러 = CPU Core (Architecture) + CPU Peripheral(Controllers)
-> 마이크로 프로세서 단독으로 있는게 아니라 주변장치 포함
주변장치 예시 : 타이머/카운터, TWI(I2C), ADC, USART, SPI, 메모리, 발진회로 등
 마이크로 프로세서와 주변장치 => 마이크로 컨트롤러
마이크로 프로세서와 주변장치 => 마이크로 컨트롤러
마이크로 컨트롤러로 할수 있는 일?
- 대부분의 제어 가능
-> 모든 제품들은 마이크로 컨트롤러 내장
ex) 드론, 로봇, 냉장고, 세탁기, 차량 등
ATmega 128 의 특징
- 데이터 시트로 확인 가능
1. 뛰어난 성능 (Advanced RISC Architecture)
- Most single clock cycle execution -> 대부분의 명령들을 한 클럭만에 실행 가능
- 32 * 8 bit 범용 레지스터 : 8비트 범용 레지스터 32개 내장 -> 고속 접근 가능한 범용 목적 8비트 메모리가 32개
2. 많은 메모리(Program 메모리, Data 메모리)
- 128 KB Flash (프로그램=명령어 메모리)
- 4 KB SRAM, 4KB EEPROM (데이터 메모리)
3. 다양한 주변장치 지원
- Timer/Counter 4개(8비트 카운터 2개, 16비트 카운터 2개), TWI(I2C) 2포트, 10bit ADC
- USART(비동기 통신) 2채널, SPI(주변장치용 직렬 통신 인터페이스), On-chip Oscillator(=8MHz, 발진기)
* 프로그램 다운로더 ISP 장비는 SPI 프로토콜로 플래시 메모리에 프로그램을 write 한다.
- ATmega128 : 0~16 MHz / 4.5 ~ 5.5V
- ATmega128L : 0~8 MHz / 2.7 ~ 5.5V(저전력에서 동작)
 ATmega 128 데이터 시트
ATmega 128 데이터 시트
ATmega128 내부 구조
- ATmega128의 핀 구조, 내부 버스에 연결된 컨트롤러를 보여주는 회로도

ATmega 128 코어 부분
- 32개의 8비트 범용 레지스터가 연산장치 ALU와 연결
- 데이터 메모리 SRAM과 EEPROM가 데이터 버스와 연결
- 좌측에 프로그램 메모리 플레시 메모리가 존재

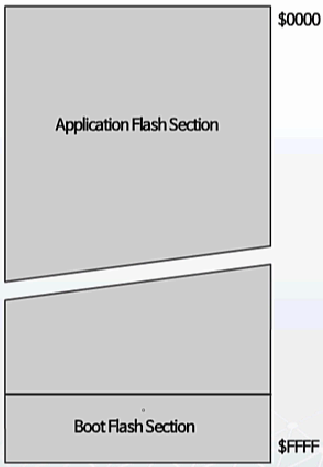
프로그램 메모리 플래시 메모리의 메모리 맵
- 부트 플래시 섹션과 어플리케이션 플래시 세션으로 나뉨
- 부트 플래시 세션 : 부트 로더
- 어플리케이션 플래시 세션 : 프로그램 저장
- 16비트로 명령어들이 저장
 128KB 프로그램 메모리맵
128KB 프로그램 메모리맵
데이터 메모리맵
- 32개 범용 레지스터, 64개 IO 레지스터은 동일
- ATmega 128은 IO 레지스터 160개 확장 가능
- 내부 SRAM 8비트 크기의 4096개
 A=Atmega128, B=103 호환보드 데이타 메모리맵
A=Atmega128, B=103 호환보드 데이타 메모리맵
폰노이만 구조
- CPU와 메모리 사이에 물리적으로 하나의 버스만 존재
- Von Neumann Bottleneck 발생
- 프로세서 <-주소/데이터 버스 -> 코드
하버드 구조
- 명령어와 데이터 버스가 분리되어 동시에 패치 가능
- 코드(명령어) <-주소/데이터-> 프로세서 <- 주소/데이터 -> 데이터
프로세서 구조
RISC(Reduced Instruction Set Computer)
- 하드웨어 구조가 단순함 -> 저전력 -> 모바일 장치에 적합
- 모든 명령어 길이가 동일 -> 코드 사이즈가 커짐
- Load Store Architecture로 많은 레지스터가 필요
- ATmega64, ATmega128, ARM, MIPS
CISC(Complex Instruction Set Computer)
- 복잡한 하드웨어 구조
- 명령어 마다 길이가 다름 -> 코드 사이즈가 작음
- RISC에 비해 작은 레지스터가 필요
- intel 8056, x86
일반적인 마이크로 컨트롤러 구조
- 고성능 마이크로 컨트롤러 = RISC + 하버드 구조 + 레지스터 중심
- 레지스터 중심 구조
1. 처리 속도 향상
2. 코드 사이즈가 작음
3. C언어 개발에 유리
CISC와 RISC 연산의 예
- 연산 예시 : A = B + C + D;
- CISC Type : 하나의 명령어로 여러번 ALU 연산
ADD R16, Mem[B], Mem[C];
ADD Mem[A], Mem[D], R16
- RISC Type : 하나의 명령에서에서 하나의 ALU 연산만 가능
LDI R17, Mem[B]
LDI R18, Mem[C}
LDI R19, Mem[D]
ADD R16, R17
ADD R16, R18
ADD R16, R19
파이프라인 동작
- RISC의 경우 하드웨어 구현이 간단하며 명령어 길이들이 동일함
- 파이프라인 사용하지 않을 시 동작 -> 작업 1개가 끝나야 다음 작업 수행(다른 작업들은 대기)
- 파이프라인 사용 시 -> 명령어 대기 시간 없이 다른 작업들을 동시에 수행

ATmega128 명령 처리 과정
- ATmega128은 2단계 파이프라인 구조로 설계됨
- 1주기 안에 명령어 1개 수행
 명령어 인출과 실행 동작
명령어 인출과 실행 동작
 1 사이클 ALU 동작
1 사이클 ALU 동작
ATmega 128 핀구조
- ATmega128은 전체 64개의 핀
- 프로그래밍 가능한 입출력 포트는 53개
PA, PB, PC, PD, PE, PF, PG까지 53개
 ATmega128 핀
ATmega128 핀
입출력 포트 제어 관련 IO 레지스터
- 각 핀 1개에 입출력 레지스터 3개가 배당 -> DDR, PORT, PIN 레지스터
Data Direct Register DDRx Register
- 해당 핀의 입력/출력 모드 설정
- 해당 핀의 특정 비트가 0이면 입력 설정, 1이면 출력 설정
ex) PA의 0번 비트를 출력 설정시 -> *DDRA=0x00000001;
ex) PA의 0~3번 비트를 출력 설정시 -> *DDRA=0x00001111;
 Data Direction Register
Data Direction Register
PORTx Register
- 해당 핀에 high를 출력할지 low를 출력할지 설정
- 0일시 0V output, 1의경우 5V output
 PORT Register
PORT Register
PINx Register
- 핀으로부터 데이터 입력을 받는 레지스터
 PIN Register
PIN Register
입출력 핀 구조
- DDR이 1로 설정 시 PORT의 값이 핀으로 출력
- DDR이 0으로 설정시 핀으로부터 입력을 PIN 레지스터에 저장됨
 병렬 입출력 포트 기본 구조 1 - 핀 방향이 출력인 경우
병렬 입출력 포트 기본 구조 1 - 핀 방향이 출력인 경우
 병렬 입출력 포트 기본 구조 2 - 핀 방향이 입력인 경우
병렬 입출력 포트 기본 구조 2 - 핀 방향이 입력인 경우
 입출력 핀 구조
입출력 핀 구조