나이퀴스트 선도
- 주파수가 0~inf 범위에서 주파수 전달함수의 크기와 위상을 극좌표계에서 나타낸 것
-> 주파수 응답 크기와 위상을 극좌표계 하나의 좌표계로 표현 가능
* bode 선도 주파수 전달함수의 크기와 위상을 각각의 직교좌표계에서 표현한것
나이퀴스트 선도
- 주파수 w(0<=w<=inf)에 따른 개루프 전달함수 G(jw)의 크기 |G(jw)|와 위상 <G(jw)를 극좌표계상에 표시한선도
-> 한개의 선도로 모든 주파수에 대한 시스템 주파수 응답 특성을 파악할 수 있음
-> 시스템 각 요소가 주파수 응답에 미치는 영향을 분명하게 알려주지는 못함
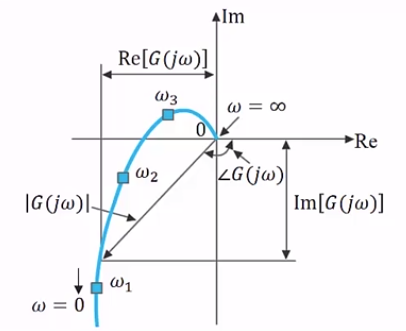
나이퀴스트 선도 예시
- w= 0으로 갈수록 크기는 무한대, 위상은 -90도
- w=inf로 갈수록 크기는 0, 위상은 90도
- w가 특정 위치에 있을때 크기는 원점으로부터의 거리, 위상은 실수부 양의 방향에서 음의방향으로 각도
=> 보드 선도랑 성격은 같으나 보여주는 형식만 극좌표 계 하나에서 다보여줌
나이퀴스트 선도를 이용한 질량-스프링-댐퍼 시스템의 주파수 응답
F(t)를 입력, x(t)를 출력으로하는 전달함수 G(s)
- m=1, b=3, k=9, zeta=0.5, wn=3(rad/s) 인 경우


공진주파수 w_r : 공진 최댓값이 나타나는 주파수
-보드선도 상 : w_r = 1.88일때 위상 -45.8도
- 나이퀴스트 선도에서 w=1.88일때 위상 -45.8도

주파수 입력 F(t)=sin(wn t)에 대한 과도 응답과 보드/나이퀴스트 선도
- 보드 선도 상 주파수 3일때 크기는 -19이며 위상 -90
- 나이퀴스트도 주파수 3일때 크기는 -이며 위상 -90
=> 실제 주파수 응답은 입력 보다 작으며 위상도 90도 뒤쳐짐

b가 변할때 G(s)의 나이퀴스트 선도를 구하자
- m=1, b=1~11, k=9, 질량-스프링-댐퍼 시스템

'로봇 > 제어' 카테고리의 다른 글
| 제어공학 2 - 22 주파수 응답을 이용한 앞섬보상기 설계 (0) | 2020.05.11 |
|---|---|
| 제어공학 2 - 21 주파수 응답을 이용한 안정도 판별 (0) | 2020.05.11 |
| 제어공학 2 - 19 Bode 선도 (0) | 2020.05.10 |
| 제어공학 2 - 18 주파수 응답 (0) | 2020.05.10 |
| 제어공학 2 - 17. 근궤적법을 이용한 뒤짐보상기 설계 (0) | 2020.05.10 |