뒤짐 보상기 설계 및 순서
설계 방향
- 과도 응답 특성은 변하지 않게 설계
-> 폐루프 시스템 근의 위치를 크게 벗어나지 않도록 보상된 시스템 근이 있도록 하고 대신 개루프 이득을 증가시키도록함
- 제어기 극정과 영점을 상대적으로 서로 가까우면서 워점에 가깝게 설정
설계 순서
1. 보상되지 않은 시스템에서 폐루프 시스템의 특성방정식 근궤적을 그린후. 동적 응답 특성에 가장 많이 영향을 주는 근
2. 보상되기 전의 정적 오차 계수를 구하고 이를 평가함
3. 정적 오차 계수를 얼마나 개선할 것인지 결정함
4. 3에 따라 적절한 뒤짐 보상기의 극점과 영점을 결정
5. 4에서 결정된 극점과 영점을 가지는 제어기 전달함수와 플랜트 전달함수의 곱으로 근궤적을 그리는 원하는 근의 위치 정함
6. 5에따라 제어기 이득을 정하고, 이득을 포함한 전체 시스템의 정적오차 계수를 구해 3이 달성하는 확인
예제
- 아래의 플랜트 전달함수의 램프 입력에 대해 정상상태 오차를 10배 작게 하고자 함

1. 다음 근궤적을 그려 K=8인 경우의 근을 찾음

=> 영향력이 큰 근의 위치는 -0.666+-1.16i

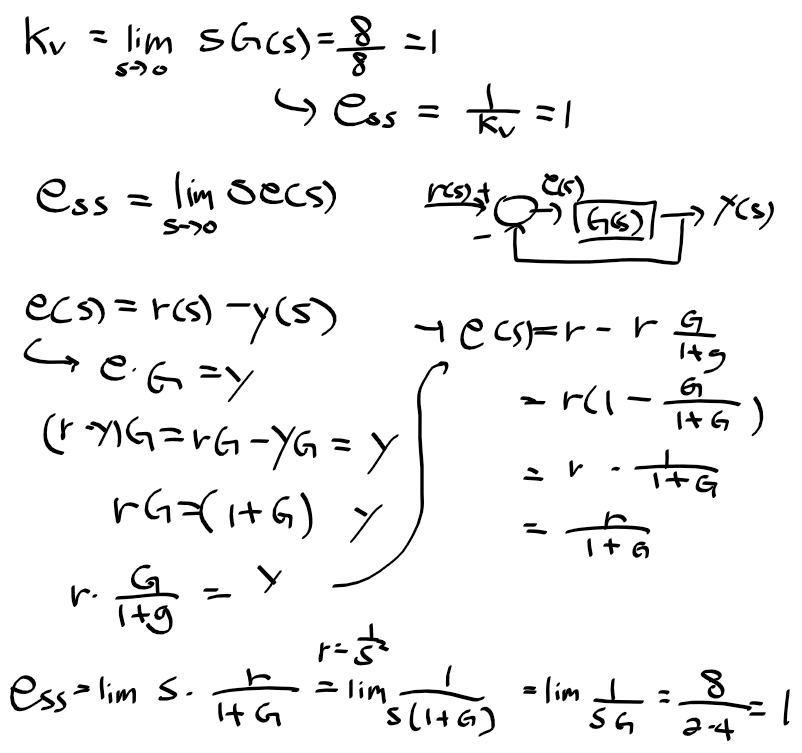
2. 램프 입력에 대한 정상상태 오차 계수를 구함

3. 정상상태 오차 계수 K_v=10으로 설정

4. s가 0일때 극점과 영점의 절대값의 비
(적절한 뒤짐보상기의 극점과 영점을 결정해야함)
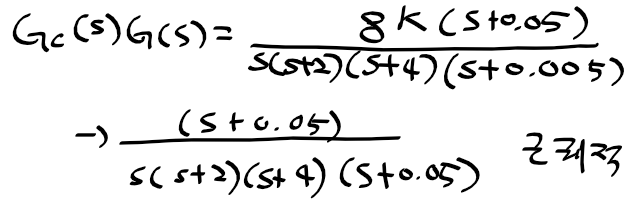
-> 원하는 정상상태 오차계수 10이 되면서 원점에 가깝도록 뒤짐 보상기 전달함수를 G_c=K_v &(s+0.05/s+0.005)로 해야함

5. 보상기와 플랜트가 포함된 근궤적을 그리기 위해 일반적인 형태를 정의 후 근궤적 그림


6. 두 근궤적을 겹쳐서 보고 이전의 근의 위치와 유사한 근의 위치를 보상기가 포함된 근궤적에서 보면 8K=8일때로 판단됨
-> 이때 보상기 이득, K=1


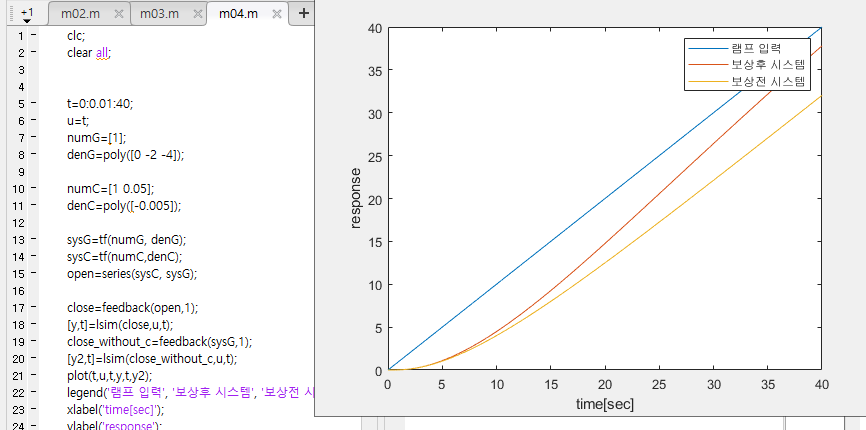
6. 이 보상기를 가졌을 때, 램프 입력에 대한 정상상태 오차 계수

+ 램프 입력에 대한 보상전과 보상후 정상상태 오차
'로봇 > 제어' 카테고리의 다른 글
| 제어공학 2 - 19 Bode 선도 (0) | 2020.05.10 |
|---|---|
| 제어공학 2 - 18 주파수 응답 (0) | 2020.05.10 |
| 제어공학 2 - 16 근궤적법을 이용한 앞섬 보상기 설계 (0) | 2020.05.10 |
| 제어공학 2 - 15 근궤적법을 이용한 비례적분미분 제어기 (0) | 2020.05.10 |
| 제어공학 2 - 14 근궤적법을 이용한 비례제어기 설계 (0) | 2020.05.09 |