주파수 응답
- 시스템에 주파수 입력 sin wnt을 주는 경우 출력 응답
주파수 응답 해석을 이용한 시스템 설계
- 시스템 성능 및 안정도를 간편하고 쉽게 보정
- 상대 안정도 및 안정도-강인성 문제 고려시 유용
주파수 대역 설계 방법 특성
- 시스템 성능 및 안정도를 간편하고 쉽게 보정
- 주파수 대역 성능과 상대 안정도, 안정도-강인성 문제 고려시 우용
- 루프 형상 보정 -> 보드 선도나 나이퀴스트 선도 같은 주파수 응답 선도에 표시된 개루프 시스템의 주파수 응답 특성을 개선시킬수 있음
- 저주파 영역 => 정상상태 거동
- 게인 교차 주파수 근처 중간 주파수 영역 => 상대안정도
- 고주파역(센서 잡음들이 고주파대역으로 들어오므로) => 센서 잡음에 대한 저감소
주파수역 제어시스템 설계 절차
1. 개루프 시스템 게인 조정
-> 보드 선도에서 요구되는 정상상태 응답 특성이 충조고디도록 위함
2. 개루프 시스템 게인만 조정된 개루프 시스템의 보드 선도 작도
3. 위상 및 게인 여유를 만족할수 있는 적절한 제어기 첨가
4. 폐루프 시스템의 과도응답 특성 평가
5. 만족스러운 결과를 얻을때까지 제어 시스템 설계 및 해석 과정 반복
앞섬 제어기 용도
- 시스템 응답속도 개선 -> 과도응답 개선 목표
- 정상상태에서 정확도를 어느정도 개선하고자 할때 사용
* 극점 첨가로 적분 효과 ->
앞섬제어기 설계
- 앞섬제어기의 극점은 영점 왼편에 존재

앞섬 제어기의 나이퀴스트 선도
- 크기 |G(s)|, 위상 <G(s)
- w=0일때 위상 0, 크기는 최소 alpha
- w=w_m일때 위상각 phi_m이 최대가 됨
- w= inf가 되면 위상 0, 크기는 1

극점과 영점
- 극점이 영점 앞에 -> 위상 앞섬(Phase Lead) 발생 -> 고주파 통과 필터 역활
- alpha 값이 작을수록 극점은 왼쪽 멀리 위치
- 하드웨어적인 문제로 실제 alpha의 최소값은 0.07
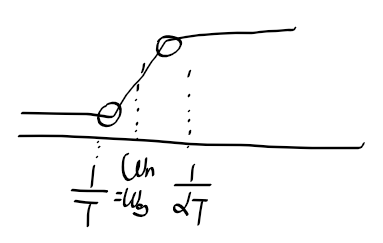
앞섬 제어기의 보드 선도
- w=w_m 일때 위상 <G(jw)가 최대
- 저주파 대역에서 크기가 작고, 고주파 대역에서 크기가 큼
- w=w_m을 기준으로 좌측은 저주파, 우측은 고주파 영역

주파수 응답을 이용한 앞섬 제어기 설계 절차
1. 정상상태 오차를 만족하기 위한 루프 게인 K 선정
2. 필요시 추가 위상섬각 결정
* 플랜트 전달함수 G(s)에 루프 게인 K를 곱한 KG(s)에 대한 게인 및 위상 여유를 Bode 선도로 알아보고 요구되는 상대안정도를 만족하기 위함
3. 필요한 추가 위상앞섬각을 얻을수 있는 alpha 선정
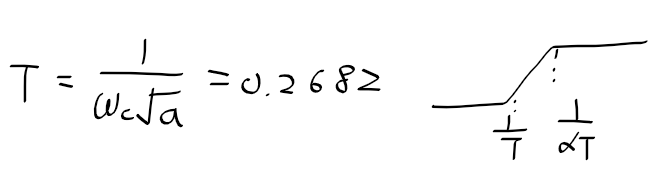
4. 적절한 T값 선정
5. 앞섬 제어기의 절점 주파수 1/T와 1/alpha T를 정함
- 최대 위상 앞섬각 phi_m이 새로운 게인 교차 주파수에 위치하도록 함
6. 만족한 결과를 얻을 때 까지 반복 수행
- 게인 여유가 충족되지 않도록 제어기의 영점 및 극점을 재배치 하며 설계 반복
앞섬 제어기 설계 예
- 속도 오차 상수 K_v = 20, 위상 여유 = 50도, 게인 여유 = 10 dB인 앞섬 제어기 설계
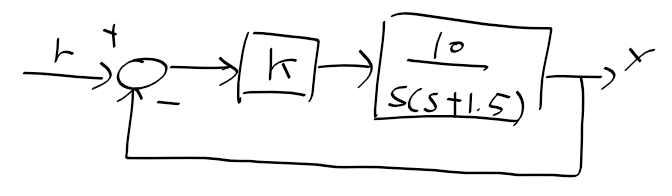
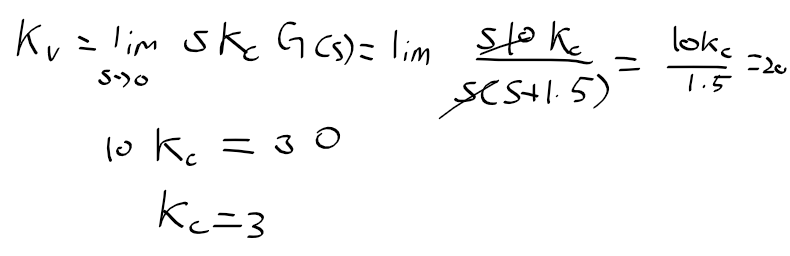
1.. 속도 오차 상수로 정상상태 응답에 관한 설계 사양을 만족하는 제어기 게인 K_c = 3 선정
* 속도 오차 상수 K_v는 과도응답 특성 중 r(t)=t 램프입력일때 출력과 오차를 e_ssv라 하며 K_v=1/ess_v
2. K_c=3을 포함한 제어기의 보드 선도
- 보드 플롯을 그려 게인 마진과 페이스 마진이 원하는 사양을 만족하는지 아니면 얼마나 게인을 보강해야하는지 판단해야함
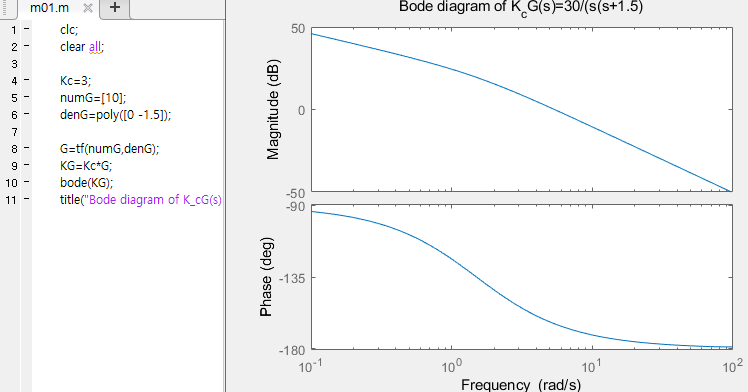
2.1 크기가 0일때 주파수와 해당 주파수의 위상 찾기
- 게인교차주파수 w_g = 5.37 rad/sec
- 시스템 위상 : <KcG(jw_g) = -164
=> 시스템 위상 여유 : -164 + 180 = 16도 -> 기준 위상 여우 50보다 34도 정도 작다
- 게인 마진 : 위상이 -180도 일때 수렴 -> inf => 이미 10db 이상 만족함

설계 사양 (위상 여유 50도)를 만족하기 위해 앞섬제어기 첨가
- 위상 앞섬각, phi_m = 34 + 5(여유) = 39
- 위상 앞섬 제어기 파라미터 선정
* 앞섬 제어기의 나이퀴스트 선도로 위상 앞섬각 phi_m을 이용하여 앞섬 제어기의 alpha를 구할 수 있다
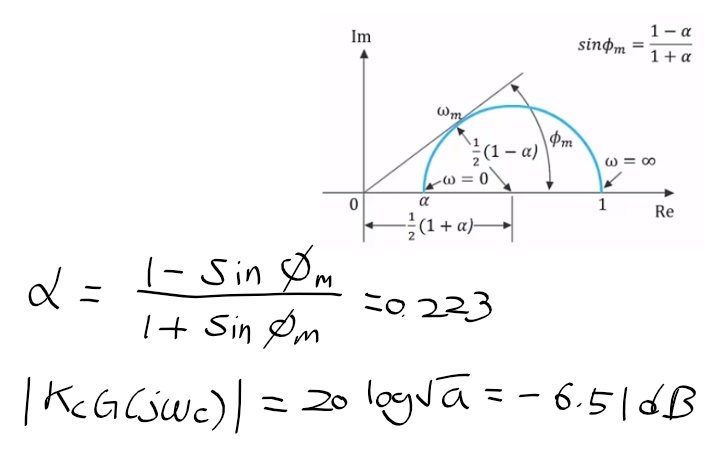
Bode 선도에서 크기가 -6.51dB를 만족시키는 주파수
- 새로운 게인 교차 주파수 w_c = 7.9 (rad/s)

절점 주파수를 구하기 위해
설계 사양을 만족하는 설계된 앞섬 제어기 K(s)

K(s)G(s)의 보드 선도
- 목표 : 페이즈 마진 = 50도, 게인 마진 = 10도
- mg=0 -> w_c=7.38이며, 이때 180-130 으로 페이즈 마진 만족
- 위상 180도일때 수렴하므로 게인 마진도 10도 안으로 만족

보상된 시스템과 비보상된 시스템의 단위 스텝 응답 (과도 응답 특성)
- 보상전 시스템은 정착시간이 6~7초 정도이나 보상된 시스템은 1초 안에 정착하며 오버슈트도 크게 줄어듬
=>과도응답 특성이 상당히 개선됨

'로봇 > 제어' 카테고리의 다른 글
| 제어공학 2 -25 자동차 서스펜션 제어 설계 (0) | 2020.05.11 |
|---|---|
| 제어공학 2 - 24 자동차 크루즈 컨트롤 설계 (0) | 2020.05.11 |
| 제어공학 2 - 21 주파수 응답을 이용한 안정도 판별 (0) | 2020.05.11 |
| 제어공학 2 - 20 Nyquist 선도 (0) | 2020.05.11 |
| 제어공학 2 - 19 Bode 선도 (0) | 2020.05.10 |