주파수 응답을 이용한 시스템 안정성 판별법
- 나이퀴스트 선도와 보드 선도를 이용
=> 시스템 동적 특성중 가장 중요
나이퀴스트 안정도 판별법
- 폐루프 제어 시스템 안정도 판별할수 있는 방법
나이퀴스트 안정도 판별법 특징
1. 불안정한 폐루프 극점 갯수를 판정 가능
- 폐루프 전달함수 구할때 극점 중 허수측 우측에 있는 극점들이 불안정한 극점
2. 시스템 상대 안정도를 시각적으로 알 수 있음
-> 필요시 시스템안정도 개선방법을 제안 가능
3. 시스템의 주파수 응답에 대한 정보를 제공
4. 수송 지연 요소를 포함한 시스템 안정도 해석에 적합한
5. 안정도-강인성 이론의 기본 개념
편각의 원리 printciple of argument
복소 함수 f(s)
- C : s평면에서 폐쇠된 시계방향의 컨투어(contour) 윤곽선
- f(s) : 한 복소 평면에서 다른 복소 평면으로 사상할수 있는 해석하수
f(s)의 성질
- f(s)는 컨투어 C 상에서 해석적임
- f(s)는 컨투어 C 내부에 Z개의 영점을 가짐
- f(s)는 컨투어 C 내부에 P개의 극점을 가짐
복소함수 f(s) 사상
- s 평면 컨투어 C는 내부에 극점 1개와 영점 1개를 포함함

컨투어 C를 복소함수 f(s)로 사상할때 상 C_m의 성질
- 복소 평면에서 폐쇄된 컨투어를 만듬
- 컨투어 C_m은 원점을 시계 방향으로 Z-P번 둘러싸고 있음
-> 컨투어 C가 극점이나 영점을 둘러싸지 않으면 컨투어 C_m은 원점을 0-0번 둘러쌈
편각의 원리
- N(0, f(s), C) = Z - P
- 폐쇄된 시계빵향 컨투어 C를 복소 함수 f(s)로 사상한 C_m이
복소수 점 a를 시계방향으로 둘러싸는 횟수를 N(a, f(s), C)=Z-P로 나타냄
- a=0 -> N(0, f(s), C) -> 컨투어 C를 f(s)로 사상한 C_m이 원점에 대한 둘러싸는 횟수를 의미
복소 함수 f(s)= f1(s) * f2(s) 일때
- N(0, f(s), C) = N(0, f1(s), C) + N(0, f2(s), C)
= (Z_1 - P_1) + (Z_2 - P_2)
나이퀴스트 컨투어 D
- 우반 s 평면 전체를 둘러싸는 반지름이 inf인 반원을 그리는 폐쇄된 시계방향의 컨투어
=> 허수축 우측 전체를 감싸는 컨투어 D
* 허수축 우측에 극이 존재하면 불안정함
- 폐루프 시스템의 특성 방정식과 극점 다항식


- 폐루프 시스템이 안정하기 위해 폐루프 극점 다항식 phi_cl(s)의 영점이 컨투어 D 내에 있으면 안됨(Z=0)
- phi_cl(s)는 분자로만 이루어진 다항식이므로 극점이 없음(P=0)
식으로 정리
- N(0, phi_cl(s), D) =0 = N(0, phi_ol(s) (1 + G(s)), D)
= N(0, phi_ol(s), D) + N(0, 1 + G(s), D) = 0
=> 오픈 루프 다항식으로 이루어진 평면에서 컨투어 D가 원점을 둘러싼 횟수
+ 1+G(s) 다항식으로 이루어진 평면에서 컨투어 D가 원점을 둘러싼 횟수 = 0 이여야 한다.

개루프 극점 다항식

는 나이퀴스트 컨투어 D 내부에 존재하는 개루프 극점, 즉 불안정한 개루프 극점의 개수 (P_u)임

- 두 갯수의 합은 0이여야 하므로 N(0, phi_ol(s), D) = P_u라면 N(0, 1+G(s), D)=-P_u여야 함

ex) 폐루프 극점이 나이퀴스트 컨투어 D 내부, 불안정한 영역에 Z개 존재한다면?

나이퀴스트 안정도 판별법 응용 1 - 안정한 시스템
- 극점 3개
- t1, t2 > 0 이므로 모든 극점은 허수축 우측에 존재하지 않음 -> P_u =0
- -1을 둘러싸는 횟수는 없으므로 N = 0
- 불안정한 극점의 갯수 Z = N + Pu = 0

- -1을 둘러싼 횟수 N=2 (작은원, 큰원)
- P_u = N(0, G(s), D) -> P_u는 우측 컨투어 D가 감싸는 횟수 -> P_u = 0
- Z = P_u + N = 2 -> 불안정한 극점의 갯수 2개

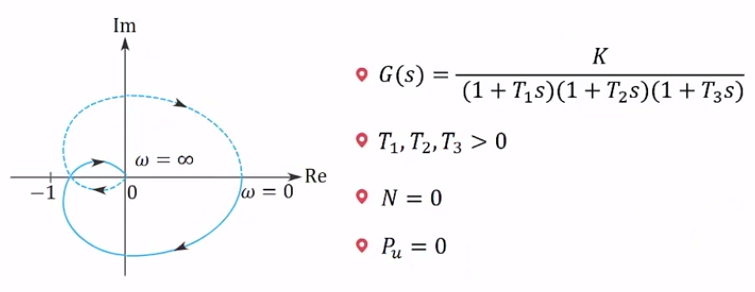
나이퀴스트 안정도 판별법 응용 2 - 안정 시스템
- T1, T2, T3이 0보다 크므로 -> N(0, G(s), D) =0 -> P_u = 0이 된다.
- -1을 감싸는 횟수가 없으므로 N = 0
=> 불안정한 근의 갯수 Z = N + P_u = 0
나이퀴스트 안정도 판별법 응용 2 - 불안정 시스템
- T1, T2, T3은 0보다 크므로, 허수 축 우측에 근이 존재 x -> P_u = N(0, G(s), D) = 0
- N(-1, G(s), D) 컨투어 D가 -1을 시계방향으로 감싸는 횟수는 작은원 1번 큰원 1번 -> N = 2
=> 불안정한 근의 갯수 Z = P_u + N = 0 + 2 = 2

나이퀴스트 안정도 판별법 응용 3 - 안정 시스템
- T1이 양수이면 극점은 양의 값이 되므로 -> P_u = 1
- 컨투어 D는 -1의 반시계 방향으로 1번 감쌈 -> -1
=> Z = -1 + 1 = 0

나이퀴스트 안정도 판별법 응용 3 - 불안정 시스템
- T1이 양수이면 극점은 양의 값을 가짐 -> P_u = 1
- -1을 감싸는 컨투어가 존재하지 않음 -> N = 0
- 불안정한 극점의 갯수 Z = 0 + 1 = 1

'로봇 > 제어' 카테고리의 다른 글
| 제어공학 2 - 24 자동차 크루즈 컨트롤 설계 (0) | 2020.05.11 |
|---|---|
| 제어공학 2 - 22 주파수 응답을 이용한 앞섬보상기 설계 (0) | 2020.05.11 |
| 제어공학 2 - 20 Nyquist 선도 (0) | 2020.05.11 |
| 제어공학 2 - 19 Bode 선도 (0) | 2020.05.10 |
| 제어공학 2 - 18 주파수 응답 (0) | 2020.05.10 |