근궤적을 이용한 적절한 이득 결정
- 근궤적으로 이득 구하기 힘든 경우도 있음
-> 앞섬 보상기 사용
앞섬 보상기
- 원하는 근의 위치를 정함
- 근궤적이 근을 지나도록 설계
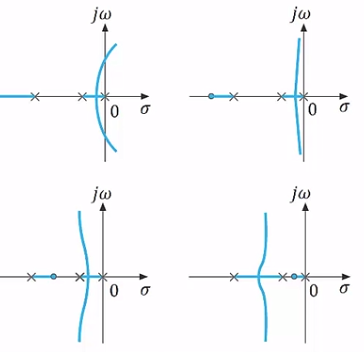
극점 첨가 효과
- 근궤적을 s평면의 오른쪽으로 끌어오는 효과가 있어 안정성이 감소
- 시스템 감쇠비가 작아져 오버슈트가 증가하고 정착시간이 길어짐
- 적분 제어 요소를 첨가하는 효과와 비슷하게 정상상태 응답을 개선할 수 있음(정상상태 오차를 줄일수 있다)

영점 첨과 효과
- 근궤적을 왼쪽으로 끌어오는 효과
- 시스템의 감쇠비가 커져 오버슈트가 감소하고 정착시간이 짧아짐
* 허수축의 가깝던 근궤적이 멀어짐 -> 빨리 수렴 -> 정착시간이 줄어듬
- 미분제어 요소 첨가하는 효과와 비슷하여 과도 상태에서 큰 제어 입력이 필요
- 영점의 위치가 허수축에 가까울수록 영점 효과가 큼
극점 첨가의 효과
- 과도 응답을 고려 시 영점 첨가가 좋으나 정상상태 응답 개선을 위해 극점 첨가가 필요
극점과 영점의 혼합
- 실제 구현가능한 제어기에서 극점의 개수가 영점 갯수보다 많거나 같으므로 혼합이 바람직
앞섬 보상기 lead compensator
- 시스템 응답 속도를 개선하고 정상상태 정확도를 개선하고자 할때 사용
- 위상 앞섬(phase lead) 발성
-> 모든 주파수에 대해 K(jw) 위상이 항상 +
- 앞섬 제어기 영점은 항상 극점의 오른쪽에 있음
- alpha 값이 작을수록 극점은 왼쪽 멀리 위치
- 하드웨어적인 문제로 alpha의 실제 최소값은 0.07
=> 영점과 극점의 위치를 어디에 둘것인가 고려하여 정해야한다.

앞섬 제어기 효과
1) 시스템 안정화 (+과도응답 특성)
- 제어기 영점은 근궤적을 s평면 상에서 왼쪽으로 움직이게 함
예제 : G(s) = K/s(s+1) 인 DC 모터에 PD 또는 앞섬 제어기 적용
- PD 제어기 전달함수


PD 제어기 문제점
- 순수 미분기는 실제 물리 시스템에서 존재 할 수없고, 센서에 의한 고주파 잡음을 증폭시킴
=> s=-alpha에 극점이 첨가된 앞섬제어기를 사용하는 것이 바람직함
앞섬 제어기 전달함수
- PD 제어기에 s=-alpha인 극점을 추가한 앞섬제어기의 전달함수

앞섬 제어의 효과
- 양쪽 근궤적에서 이득 K가 작은경우 PD 제어와 효과 유사(허수축에 가까우므로)
- K가 커지면서 앞섬제어 효과가 두드러짐
극점과 영점의 결정
- 영점은 정착시간을 고려하여 결정(미분 유사 효과)
- 극점은 영점의 3~20배 위치에 놓아 정상상태 오차를 줄임(적분 유사 효과)

과도응답 특성이 정해진 경우
- 앞섬제어기

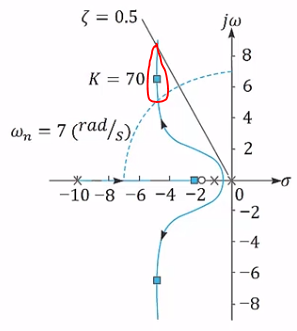
- 근궤적이 아래의 그림과 같을 때
감쇠비 > 0.5, 고유주파수 > 7(rad/s)를 만족하는 이득을 원한다면
1) 감쇠비 > 0.5 -> zeta=0.5 선의 좌측
2) 고유주파수 > 7(rad/s) -> wn=7(rad/s) 점 선의 좌측
=> K=70, 조건을 만족하는 K는 하나가 아님
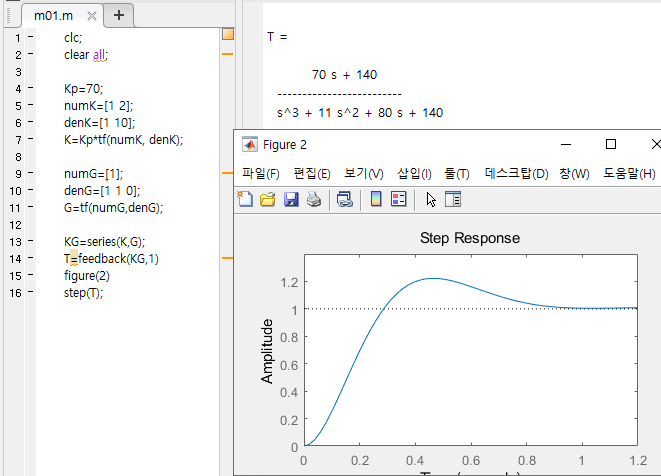
앞섬 제어기가 포함된 폐루프의 스텝응답
- 아래의 앞섬 제어기를 포함시킨 폐루프 시스템의 스텝 응답

앞섬제어기가 포함된 폐루프의 근궤적선
- 게인이 70일때 damping > 0.5, wn > 7 조건 만족 + 오버슈트 12%

비례 제어기만 있는 폐루프 시스템의 근궤적선
* 게인이 0.782 인경우
댐핑비 : 0.566
고유주파수 : 0.884
- 앞섬제어기에 비해 허수축에 가까이 위치함

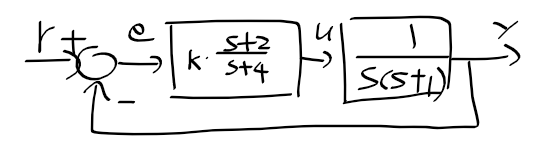
원하는 극점이 있는 경우
- 감쇠비 = 0.5, 고유주파수 = 2(rad/s)가 요구되는 경우 => 앞섬 제어기로 옮기자

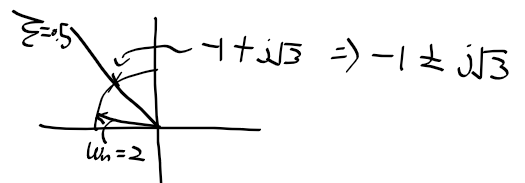
원하는 근에서 플랜트 개루프함수 G(s)의 위상 = -210도
1) 제어기 K(s)에 위상 30도를 주아 위상조건식 -180도 만족
2) 제어기 영점이 -2로 정해지면 극점을 -4에 위치시켜 30도 만족

앞섬제어기가 추가된 블록선도
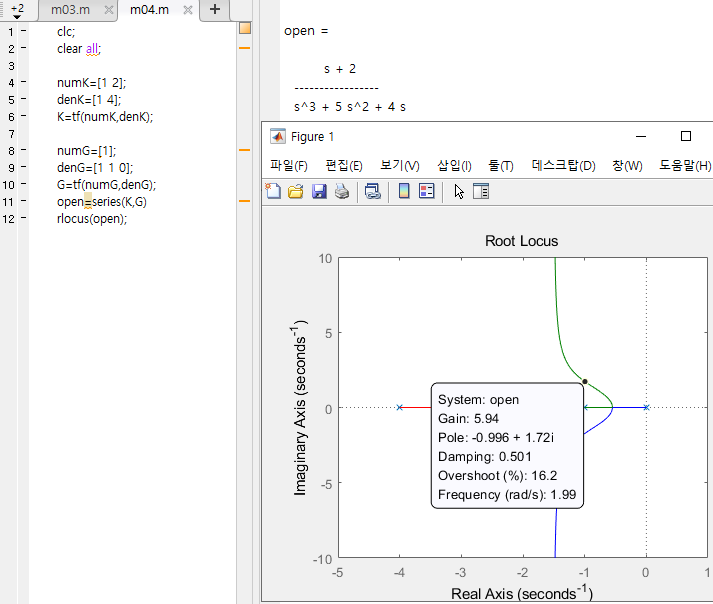
근궤적선으로 조건을 만족하는 게인 찾기
- 게인이 5.94 일때
-> 감쇠비 : 0.5, 고유주파수 =2(rad/s) 만족
해당 조건에 대한 스텝 응답

'로봇 > 제어' 카테고리의 다른 글
| 제어공학 2 - 18 주파수 응답 (0) | 2020.05.10 |
|---|---|
| 제어공학 2 - 17. 근궤적법을 이용한 뒤짐보상기 설계 (0) | 2020.05.10 |
| 제어공학 2 - 15 근궤적법을 이용한 비례적분미분 제어기 (0) | 2020.05.10 |
| 제어공학 2 - 14 근궤적법을 이용한 비례제어기 설계 (0) | 2020.05.09 |
| 제어공학 2 - 13 근궤적법 (0) | 2020.05.09 |