외부 인터럽트 벡터
- 인터럽트 벡터 테이블에서 상위에 위치

ATmega128에서 외부 인터럽트 핀 결정
- GPIO 핀 -> 범용 입출력 핀
- ATmega128의 53개의 핀만으로 다양한 기능을 동작하기엔 부족 -> 한 핀이 다른 기능도 사용 가능

외부 인터럽트 핀
- PD0 ~ PD3까지가 INT0 ~ INT3
- PE4 ~ PE7 까지가 INT4 ~INT7
- 해당 GPIO핀들을 외부 인터럽트 핀으로 사용가능


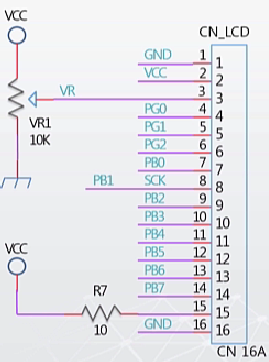
외부 인터럽트 회로
- 인터럽트 설정을 해야 외부 인터럽트 사용 가능


외부 인터럽트 벡터 매크로
- 외부 인터럽트 0과 외부 인터럽트 3을 사용 시 벡터 매크로 설정
- 스위치 첫번째와 네번째를 외부 인터럽트 핀으로 사용
#include <avr/interrupt.h>
ISR(INT0_vect)
{
}
ISR(INT3_vect)
{
}
SREG Register
- 인터럽트 사용시 내부에 인터럽트 관련 설정을 했을때만 동작
-> 아무때나 인터럽트 발생 방지
-> 레지스터 설정을 해야함 ->SREG 레지스터
- Status Register : 상태 레지스터
- 인터럽트를 사용하기 위해서 SREG 레지스터의 7번 비트에 1을 써야함(글로벌 인터럽트)


글로벌 인터럽트 설정
- SREG 레지스터 7번 비트에 1을 저장
- 상태 레지스터는 다른 역활도 수행하므로 잘못 변경되지 않도록 주의
SREG |= (1<<SREG_I)
// SREG |= (1<<7);
// SREG = SERG | (1<<7);
SEI와 CLI 명령어
- sei() : Global Interrupt Enable -> 전체 인터럽트 활성
- cli() : Global Intterupt Disable -> 전체 인터럽트 비활성
sei();
// SREG |= (1 << SREG_I)와 같다.
cli();
// SREG |= (0 <<SREG_I)와 같다.
EIMSK Register
- External Interrupt MaSK Resgister
- 외부 인터럽트를 개별적으로 허용하는데 사용
- 사용하려는 외부 인터럽트를 high를 주면 된다.
ex) INT0 ~ INT3 을 1로 주면 외부 인터럽트 0 ~ 3 사용 가능

EIMSK Register 사용 예시
EIMSK = (1 << INT3);// 1 << 3 = 0b0000 1000;
EIMSK = (1 << INT0) | (1 << INT2); // 0b000 0101
EICRA/EICRB Register
- External Interrupt Control Register A/B
- EICRA : 외부 인트럽트 INT0 ~ INT3 감지 방법 결정
- EICRB : 외부 인터럽트 INT4 ~ INT7 감지 방법 결정


EICRA Register
- ISC(숫자)1/0 과 같은 이름 규칙을 가짐
-> ISC01, ISC00 : 외부 인터럽트 0번 설정
-> ISC11, ISC10 : 외부 인터럽트 1번 실징
아래의 테이블 참고
ex 1) ISC01 = 1, ISC00 = 0 일 시
-> 외부 인터럽트 0번에 폴링 에지 때 인터럽트 발생
ex 2) ISC71 = 1, ISC70 = 1 인 경우
-> 외부 인터럽트 7번이 라이징 에지 때 인터럽트 발생
=> 스위치가 눌릴때 인터럽트? 눌리고 땔때 인터럽트?
- 스위치 여러개 사용 시 각각에 대해 별도로 코딩해야함

EICRA 코드 구현
EICRA |= (0<<ISC21) | (0<<ISC20); //INT2핀에 Low 신호 입력 순간 인터럽트 발생
EICRA = (1<<ISC21) | (1<<ISC20) | (1<<ISC11) | (0<<ISC10);
// INT2 핀 라이징 에지 시 인터럽트 발생 + INT1핀 폴링 에지시 인터럽트 발생
1. 외부 인터럽트 0 로우 레벨 시 LED on/Off
#include <avr/io.h>
#include <avr/intterupt.h>
#include <util/delay.h>
ISR (INT0_vect)
{
PORTC = 0x00;
_delay_ms(50);
PORTC = 0xFF;
_delay_ms(50);
}
int main(void)
{
DDRC = 0xFF; // 출력 모드
PORTC = 0xFF; // 하이레벨
DDRD = 0x00; //입력 모드
PORTD = 0xFF; // 내부 풀업 사용
EICRA = (0 << ISC01) | (0 << ISC00);
//Low가 들어오는 순간 인터럽트 발생 -> 내부 풀업으로 기본 상태 1 -> 스위치 클릭시 0-> INT0 발생
EIMSK = (1 << INT0); //INT0 허용
sei();//글로벌 인터럽트 인에이블
while(1);
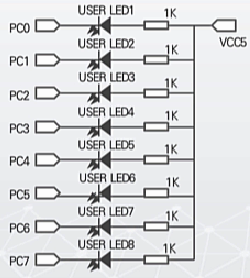
}회로 설정
D1 VDD n1 ;LED D1이 VDD와 n1 node사이에 연결1
R1 n1 PC0 330 ; 저항 R1을 n1 node와 PC0 사이에 연결
D2 VDD n2
R2 n2 PC1 330
D3 VDD n3
R3 n3 PC2 330
D4 VDD n4
R4 n4 PC3 330
D5 VDD n5
R5 n5 PC4 330
D6 VDD n6
R6 n6 PC5 330
D7 VDD n7
R7 n7 PC6 330
D8 VDD n8
R8 n8 PC7 330
K0 PD0 VSS LATCHEd ;K0 스위치는 래치타입 - 래치 스위치를 사용하여 한번 누르면 눌린 상태가 유지됨
-> 눌린 상태서 HIGH, 다시 누르면 LOW로 변함

'로봇 > 전기전자&메카' 카테고리의 다른 글
| 하드웨어회로설계 - 2. 전자파 대응 설계 필요성 (0) | 2020.08.10 |
|---|---|
| 하드웨어회로설계 - 1. orcad 개요 (0) | 2020.08.10 |
| 마이크로프로세서 메카트로닉스 제어 - 10 인터럽트 이해 (0) | 2020.05.13 |
| 마이크로프로세서 메카트로닉스 제어 - 9 LCD 제어 2 (0) | 2020.05.13 |
| 마이크로프로세서 메카트로닉스 제어 - 8 LCD 제어 1 (0) | 2020.05.13 |