비례적분미분제어 proportinal integral differential control
- 일반적인 형태의 피드백 시스템
- 부족한 정상상태응답 특성
- 시스템 안정도 개선에 필요한 적분/미분 요소 => 플랜트 입력
- 각 제어기의 적절한 이득을 결정하는것이 핵심
제어 시스템 설계 절차
- 제어기 전달함수의 형태 선정
-> 비례제어, 비례미분제어, 비례적분제어를 할지 셋다 할지 등
- 설계 파라미터들을 해석적인 방법으로 적절히 선정
- 설계된 제어 시스템의 안정도 및 성능 검토
- 성능이 불만족한 경우 -> 요구된 성능을 얻도록 반복 수행
제어기 설계만으로 요구 성능 불충족시
- 플랜트 구조나 재료 변경 또는 수동적 감쇠 효과 보강 등 플랜트 동적 특성 자체 변경
- 센서 및 구동기를 추가 또는 재배치
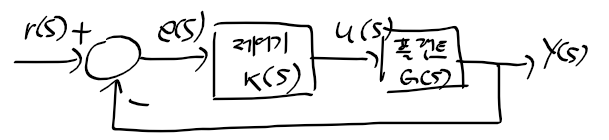
일반적인 제어 시스템
- 제어기 출력이 플랜트 입력이 되는 제어시스템
- 제어기 형태에 따른 분류
-> 비례, 비례적분, 비례미분, 비례적분미분 제어기
적분 제어 요소
- 적분 요소를 포함한 플랜트에 대한 비례 제어 시스템 오차
* 적분요소 포함 : 극점 중 하나가 0 = 전달함수에 1/s를 곱함.
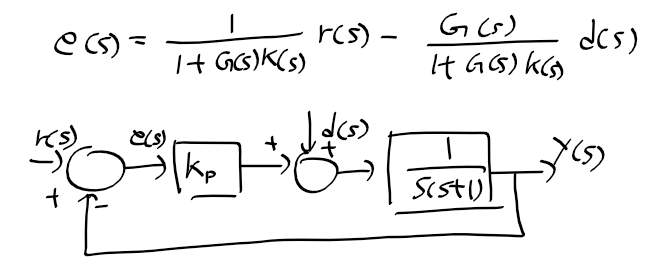
적분 요소를 포함하는 플랜트의 스텝 입력에 대한 비례 제어의 정상상태 오차
-> 외란에 의해 0이 되지 않음

비례 제어이득 K_p를 증가시키는 경우
- 정상상태 위치 오차를 줄일수 있음
- 큰 제어량이 요구되며 진동 출력이 심함
외란이 큰 경우
- 비례 제어만으로 부족

PI(비례적분) 제어기의 전달함수와 정상상태 오차
- 비례적분 제어기의 전달함수

- 비례적분 제어기의 오차
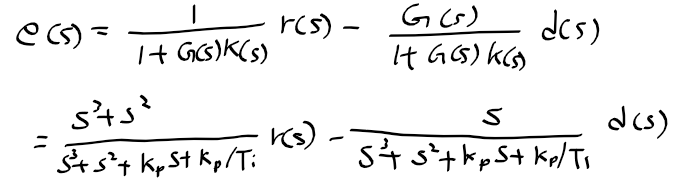
- 플랜트에 대한 PI 제어시스템의 특성방정식
-> PI 제어 게인 Kp/Ti에 따라 시스템이 불안정 해질 수 있음

비례적분 제어시스템의 정상상태 오차
- 스탭 입력에 대한 정상상태 오차
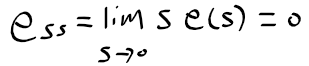
* 적분 제어 요소
- 일정 입력에 대해 정상상태 오차를 발생하지 않도록 함
- 시스템 안정도 저해
미분 제어 요소
- 오차 신호 변화에 따라 동작 -> 미분 제어 요소만 사용할 수 없음
* e_dot(오차 변화량) x K_d(미분 게인)
- 초기에 큰 제어량이 요구됨
- 시스템 안정도 개선
- 감쇠 효과 -> 시스템 이득을 증가시켜 정상상태 오차를 줄임
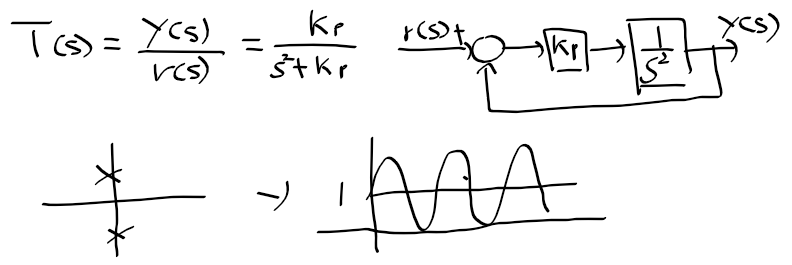
이중적분 요소를 포함한 플랜트에 대한 비례제어 시스템 응답(1/s^2)
- 폐루프 시스템 전달함수 (T(s))로부터 특성 방정식이 두 허근을 가짐
- 무한 진동을 하므로 안정화 필요
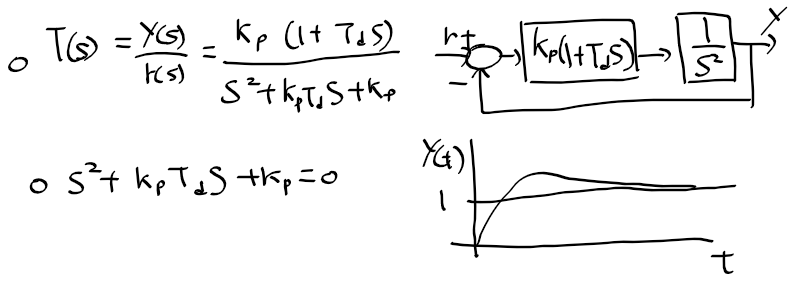
비례 미분 PD 제어기
- Kp, Td 값에 따라 오버슈팅이 커질 수 있음
비례적분미분 PID 제어기
- 산업현장에서 가장 많이 사용되는 제어기
- 비례 적문 미분 제어기의 전달함수
kp : 비례 게인, ki : 적분 게인, kd : 미분 게인
Ti : 적분 시간. Td : 미분 시간

배의 자동 조차 시스템 설계
- 조타 각 : delta, 배가 향하는 각도 : theta
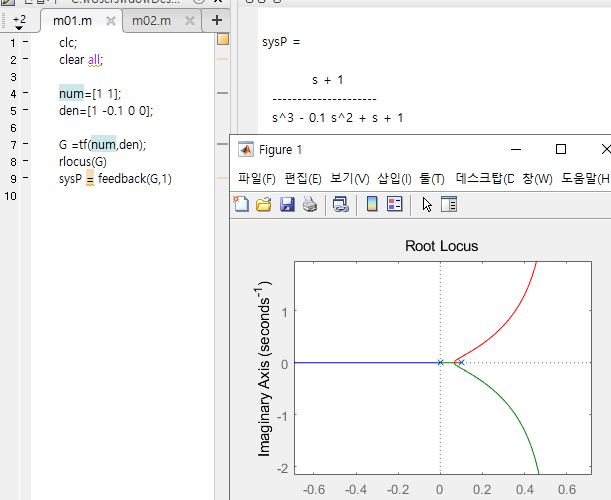
플랜트 전달함수
- 아래의 전달함수 극점 하나가 양의 실수 -> 안정화 필요


배의 자동조타를 위한 제어 시스템 설계
- 제어기 K(s)의 형태

희망 설계 사양
- 단위 스텝 기준입력, 단위 램프기준입력에 대해 정상상태오차 = 0
- 폐루프 시스템의 감쇠비 = 0.707
비례 제어
-불안정
비례 적분 제어
- 불안정

비례미분제어기
- 안정

단위 스텝 입력/단위 램프입력에 대한 정상상태 오차
- 단위 스텝/램프 입력에 대한 정상상태 오차가 0이 됨
-> 감쇠비만 맞추면 됨

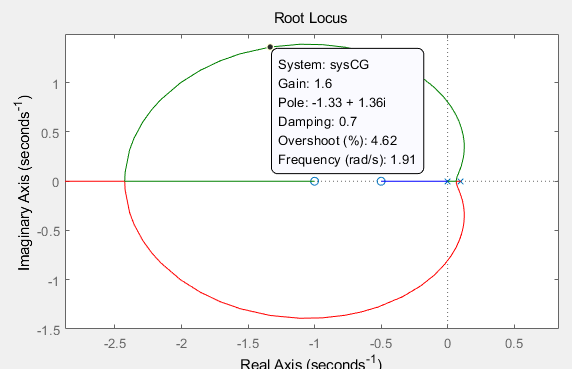
요구되는 감쇠비
- zeta=0.707인 게인을 찾으면 됨
-> 제어기 게인 K=1.6 정도
'로봇 > 제어' 카테고리의 다른 글
| 제어공학 2 - 17. 근궤적법을 이용한 뒤짐보상기 설계 (0) | 2020.05.10 |
|---|---|
| 제어공학 2 - 16 근궤적법을 이용한 앞섬 보상기 설계 (0) | 2020.05.10 |
| 제어공학 2 - 14 근궤적법을 이용한 비례제어기 설계 (0) | 2020.05.09 |
| 제어공학 2 - 13 근궤적법 (0) | 2020.05.09 |
| 제어공학 2 -12 비선형 모델링 및 해석 (0) | 2020.05.09 |