라플라스 변환 laplace transform
- 시간 영역에 대한 시스템(함수)를 주파수 영역으로 변환하는것

* 푸리에 급수 : 주기 신호(함수)에 대한 주파수 영역으로의 변환
푸리에 변환 : 비주기 신호(함수)에 대한 주파수 영역으로 변환
라플라스 변환 : 비주기 발산신호의 주파수 영역 변환
역라플라스 변환 inverse laplace transform
- 주파수 영역의 함수를 시간 영역에 대한 함수로 변환

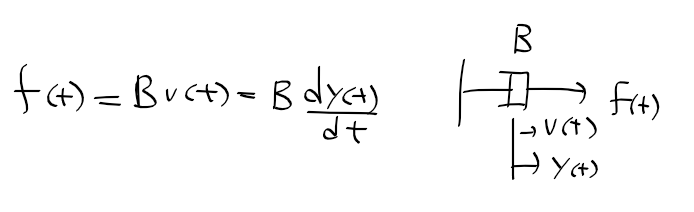
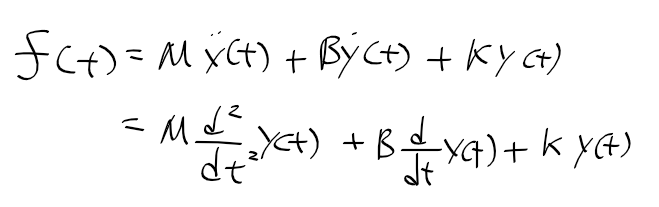
미분 방정식 differential equation
- 모든 물리 시스템은 미분 방정식으로 표현 가능함
- 종속 변수에 대한 독립 변수의 미분
- 미분 방정식에서의 미분이 상미분인지 편미분인지에 따라 분류됨
미분 방정식을 통해 해를 구하는 과정
1. 제어 시스템의 해를 구하기 위해 실제 현상을 미분 방정식으로 물리적 모델링
2. 미분 방정식을 라플라스 변환하여 대수 방정식으로 바꿈
3. 대수 방정식의 해를 구한 후 다시 역라플라스 변환
4. 시스템의 해를 구함
선형 미분 방정식 linear differential equation
- 종속변수 및 그 도함수가 1차이고, 각 계수(coefficient)가 독립변수 만의 함수
- 상수 계수 선형 미분 방정식

미분 방정식의 해- 일반해(보조, 동차해) general solution과 특수해 particular solution등이 있음- 완전해 complete solution = 일반해 + 특수해

제어 시스템과 미분 방정식의 해
- 시간 영역에서의 응답(완전 응답) = 고유 응답(과도 응답) + 강제 응답(정상 상테 응답)
- 미분 방정식의 특수 해 = 강제 응답, 정상상태 응답
- 미분 방정식의 일반 해 = 과도 응답, 고유 응답
- 미분 방정식의 완전해 = 완전 응답(시간 응답)
과도 응답 transient response, 고유 응답 natural response- 시간이 지나면서 사라지는 응답.
회로, 시스템의 특성을 나타냄
강제 응답 forced response, 정상상태 응답 steady state response
- 시간이흐른뒤 과도 응답이 0이되어 남는 시스템 응답. 외부의 입력에 의해 발생하는 응답
완전 응답 complete solution
- 과도 응답 + 정상상태 응답으로 시간 영역에서의 시스템의 응답
선형 시스템에서의 강제응답(정상상태 응답 특성)
- 입력 유형에 따라 출력 유형을 약간이나마 알 수 있음
- 입력이 상수 -> 출력도 상수
- 입력이 정현파 -> 출력도 정현파
제어 시스템에서의 고유응답 transient response
- 선형 미분방정식에서 입력이 0이며, 초기조건이 주어진 경우에 대한 응답

시불변 시스템 time invariant system
- 입력 r(t)와 출력 c(t)가 다음의 선형 미분방정식으로 나타내며 계수 a와 b가 상수인 경우. 시불변 시스템

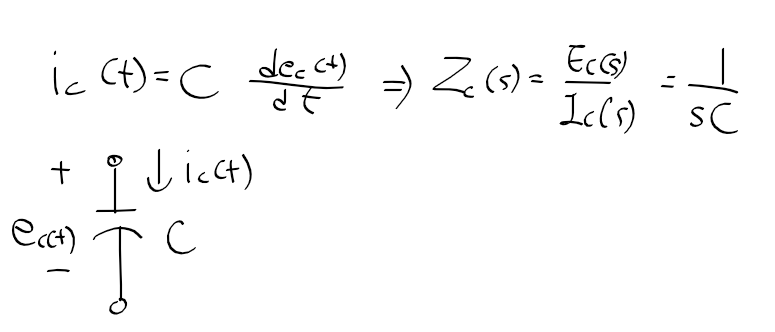
전달 함수 transfer function
- 모든 초기조건이 0일때, 주파수 영역에서 출력 C(s)와 입력 R(s)의 비
- 단일 입력, 단일 출력에 대한 시스템의 특성을 나타냄
=> 시스템 안정성 등 중요한 정보들을 알려줌

전달 함수와 블록선도 block diagram
- 아래와 같이 입력과 출력에 대한 관계를 전달함수로 나타낸 그림

극점과 영점
- 극점 pole : 전달 함수 분모 다항식의 근
- 영점 zero : 전달 함수의 분자 다항식의 근
전달 함수로 얻을수 있는 시스템 특성
- 임펄스 응답 impulse response : 임펄스 신호에 대한 시스템의 반응
- 계단 응답 step response : 계단 신호에 대한 시스템 반응
- 주파수 응답 frequency response : 주파수 영역에서의 시스템 응답
일차 시스템 first order system
- 물탱크에 물을 채우는 시스템 처럼 종속 변수에 대한 독립 변수의 1차 미분으로 표현가능한 시스템
시스템의 시간 영역에 대한 응답 관련 용어
- 시정수 time constant : 1차 시스템(1차 회로)에서 과도 응답 특성을 나타냄. 정상상태의 63%에 이르는 시간
- 정착 시간 settling time : 정상상태의 98%에 도달하는데 걸리는 시간
- 과도 상태 transient state : 정착되기 이전의 상태
- 정상 상태 steady state : 정착 된 이후 상태
- 정상 상태 오차 steady state error : 기준 입력 r(t)와 정상 상태 출력 y(t)의 차이
- 오버슈트 overshoot : 시스템 응답이 최대치가 됬을때의 값
- 피크시간 peak time : 오버슈트일때의 시간
=> 제어기 controller는 시스템이 빠르게 정상상태에 수렴하도록 함
 http://www.ktword.co.kr/abbr_view.php?nav=&m_temp1=1568&id=196
http://www.ktword.co.kr/abbr_view.php?nav=&m_temp1=1568&id=196
동적 시스템 dynamic system
- 시스템의 차수가 높아질 수록 입력에 대한 응답이 복잡해짐
-> 입력을 그대로 따르지 않는 시스템
이차 시스템 quadratic system
- 전달 함수가 이차 함수로 이루어진 시스템
이차 시스템 전달함수의 표준 형태 standard form
- 아래와 같으며, 여기서 전달 함수의 분모를 특성 방정식 characteristic equation이라 함

특성 방정식에서의 댐핑비와 고유주파수
- 댐핑비 damping ratio : 시스템이 얼마나 빠르게 수렴(감쇄되는지)를 나타냄
- 고유 주파수 natural frequency : 시스템이 얼마나 진동하는지를 나타냄
감쇄비 damping ratio
- 과감쇄, 오버슈트 overshoot : 댐핑비 zeta > 1
- 임계감쇄 critically damped : 댐핑비 zeta = 1
- 과소감쇄, 언더슈트 undershoot : 댐핑비 zeta <1
극 영점도 pole-zero diagram
- 복소평면 상에서 극점과 영점을 나타낸 그림
- 극점은 x 영점은 o로 표시

극점의 위치에 따른 시스템 임펄스 응답
- 아래의 그림은 극점의 위치에 따른 시스템의 임펄스 응답
 file:///C:/Users/do/Downloads/5_Additional_Poles_and_Zeros.pdf
file:///C:/Users/do/Downloads/5_Additional_Poles_and_Zeros.pdf
댐핑 비와 시스템 응답

주파수 응답 frequency response
- 주파수 영역에서의 시스템 응답
피드백 시스템
- 시스템 출력을 입력으로 되돌려(feedback)하여 오차를 줄여나가는 시스템

부궤환과 정궤환
- 부궤환 negative feedback : 기준 입력 - 출력
- 정궤환 positive feedback : 기준 입력 + 출력

피드백 전달함수가 상수인 일차 시스템
- 피드백 이득 K_F가 상수인 경우
- 폐루프 전달함수는 아래와 같다.

외란 disturbance
- 외부에 의한 원치 않은 입력. 바람, 잡음 등
직렬 제어 cascade control
- 외란의 영향을 받는 직렬 제어 시스템