728x90
제어 시스템
- 제이 시스템 = 전기 시스템 + 기계 시스템 + (유압 시스템)
기계 시스템에서의 운동
- 회전 운동 rotation + 병진운동 translation
- 뉴톤의 운동 법칙이 적용됨
병진 운동
- 강체의 직선, 곡선 방향의 운동
- 변수 : 가속도, 속도, 변위
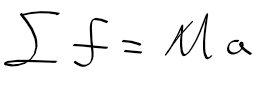
운동 방정식 equation of motion
- 물체에 가해지는 힘 f의 합 = 질량 M * 가속도 a와 같다.
힘-질량 시스템과 운동 방정식
- 아래의 힘-질량 시스템이 주어질때

- 이에 대한 운동 방정식은 아래와 같음.

힘-스프링 시스템
- 변위 y(t)는 힘 f(t)에 비례

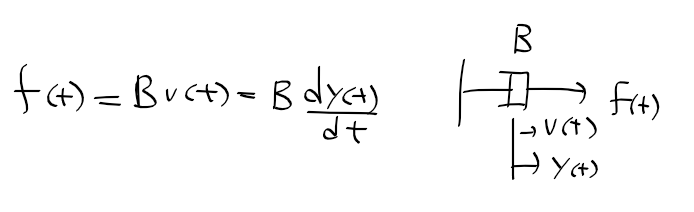
힘-댐퍼 시스템
- 댐핑은 속도에 비례해서 제동을 주며, 댐핑힘 B과 속도의 관계는 아례와 같음
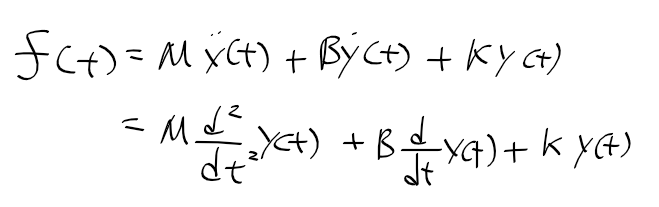
질량-스프링-댐퍼 시스템의 자유 물체도
- 아래의 질량-스프링-댐퍼 시스템이 주어질때 자유물체도는 우측과 같다.

- 이 시스템의 운동방정식은 다음과 같이 정리할 수 있다.
300x250
'로봇 > 제어' 카테고리의 다른 글
| 제어 - 6. 회전 운동 시스템 (0) | 2020.08.23 |
|---|---|
| 제어 - 4. 전기 시스템 (0) | 2020.08.23 |
| 제어 - 3. 신호 흐름과 상태 공간 (0) | 2020.08.23 |
| 제어 - 2. 제어 공학에서의 수학적 배경 (0) | 2020.08.23 |
| 제어 - 1. 제어 공학 기본 용어 (0) | 2020.08.23 |