728x90
각 축 값을 애니메이션으로 출력하기전에
일단 자이로 x값들을 플로팅 하고자 한다.
gyro X 데이터들을 모아 플로팅 시켜보자
* 내용 중간 이후에 X축 각가속도에 대한 내용 나옴
일단 우선 프린팅부터 해보면
from zumi.zumi import Zumi
import numpy as np
import time
zumi = Zumi()
idx = 0
print("curr idx : " + str(idx))
while idx < 30:
gyroX = zumi.update_angles()[0]
print("gyro X : " + str(round(gyroX, 3)))
time.sleep(0.1)
idx = idx + 1
주미는 가만히 있는데 gyro X 값이 계속 증가하고 있다.

조금 이상해서
이 코드로 돌아와 출력시켜보았을때.
from zumi.zumi import Zumi
import time
zumi = Zumi()
for i in range(0, 50):
vals = zumi.update_angles()
gyroX = " gyroX : " +str(round(vals[0],2))
gyroY = ", gyroY : " +str(round(vals[1],2))
gyroZ = ", gyroZ : " +str(round(vals[2],2))
accX = ", accX : " + str(round(vals[3],2))
accY = ", accY : " + str(round(vals[4],2))
msg = gyroX + gyroY + gyroZ + accX + accY
print(msg)
time.sleep(0.1)
print("Done")
자이로 값들만 계속 누적되는걸 볼수 있다.

ref : http://docs.robolink.com/_old_1.2_01.zumi-library/update_angles
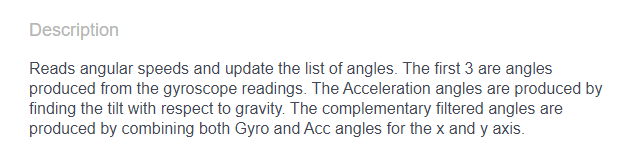
위 링크와 내가 아는 개념이 조금 햇갈린다.
자이로 센서는 각(회전) 속도
가속도 센서는 평행이동 속도로 알고 있으나
지금보니 자이로 센서에서 읽어들인 값으로
gyro angles 각 변위와 acc angle 각 가속도를 의미하는것같다.
그래서 각가속도는 가만히 있는 동안 -1 ~ 1 사이를 진동하는 동안
gyro angles의 값들이 누적되는걸로 보인다.
일단 X축 각가속도 플로팅은 다음에
300x250
'로봇 > 로봇' 카테고리의 다른 글
| zumi - 7. x축 가속도 프린팅 (0) | 2020.08.24 |
|---|---|
| zumi - 6. 가속도 데이터 받기 (0) | 2020.08.24 |
| zumi - 4. 자이로 프린팅 (0) | 2020.08.24 |
| zumi - 3. 주미 samba 설치 (0) | 2020.08.24 |
| zumi - 2. 주미 vnc 접속하기 (0) | 2020.08.23 |