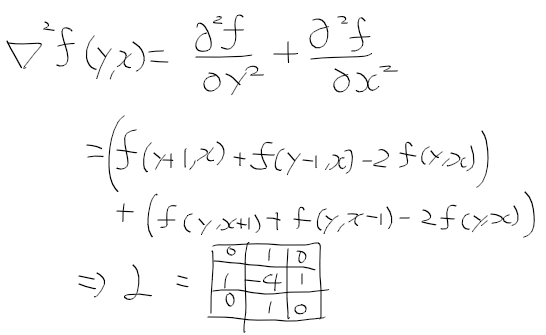
정규 라플라시안
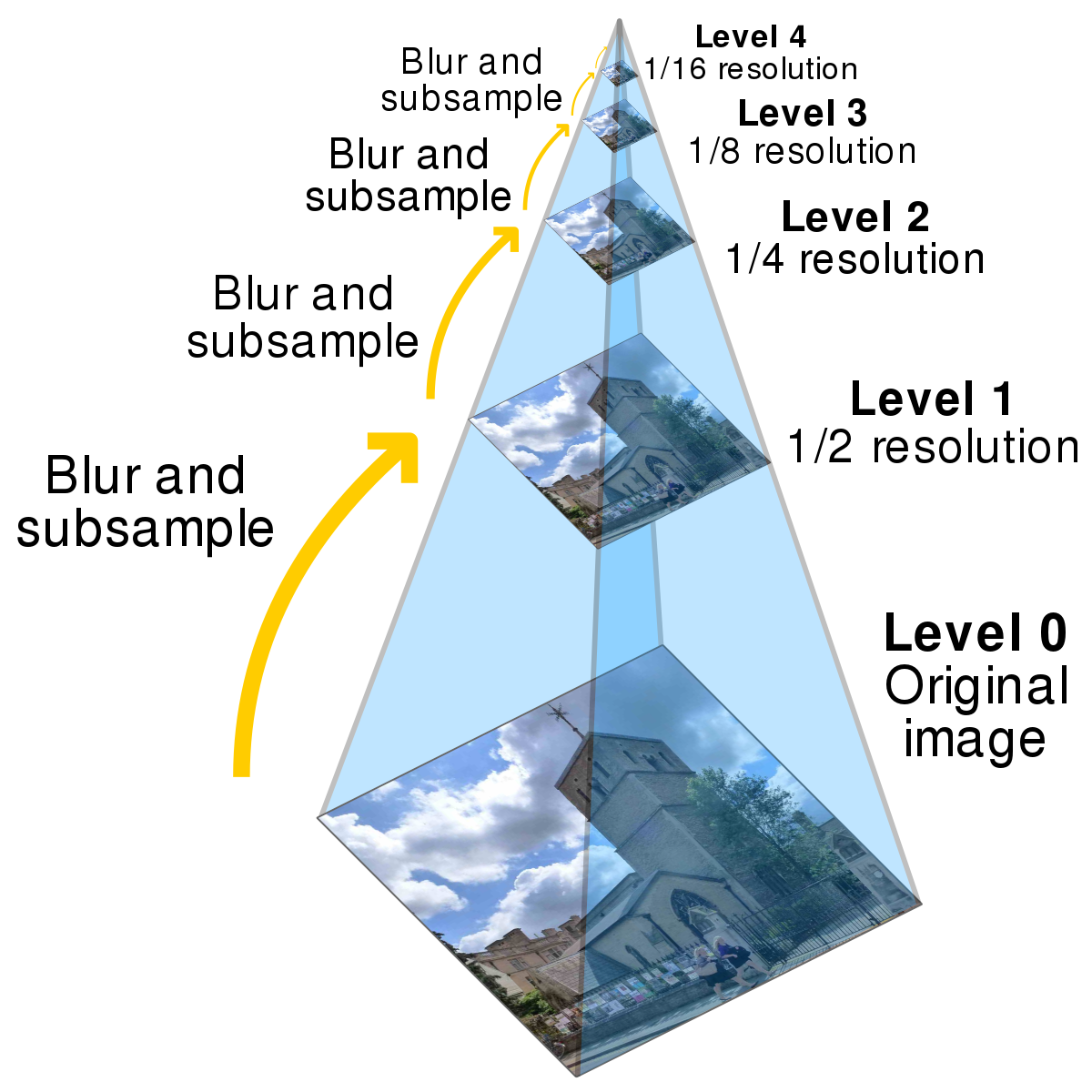
지난 글에서는
스케일 불변한 특징점을 구하기에 앞서
다중 스케일 영상을 구하였다.
y, x, sigma2로 이루어진 3차원 공간에서 지역 극점을 구하기 위해 정규 라플라시안을 적용하여보자.
정규 라플라시안 normalized laplacian은 라플라시안 영상에 분산 sigma2를 곱한것으로
(LOG 참고)sigma가 클수록 y, x에 대한 이차 미분 영상이 작아지는것을 정규화 하기 위함.
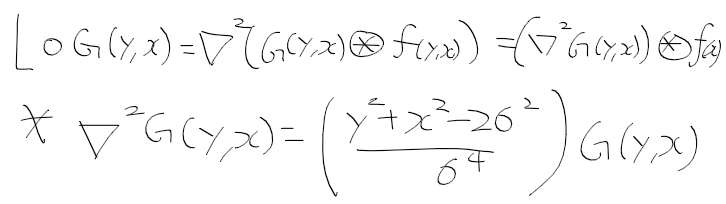
정규 라플라시안은 기존의 라플라시안에 분산을 곱한것이니
다음과 같이 정리할수 있겠다.

린드버그와 스케일 공간
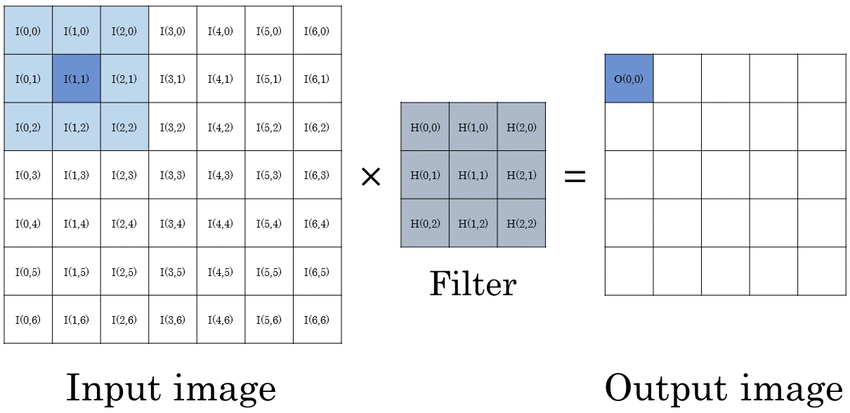
이제 스케일 별화를 다루기 위해 동일하지만 크기가 다른 두 블롭이 존재하는 영상(1)을 살펴보자
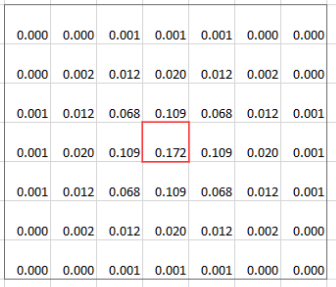
원본 영상으로부터 정규 라플라시안 영상을 취득(2)하고,
오른쪽 그래프에서 작은 블롭. 과 큰블롭의 중심에서 스케일 sigma의 변화에 따른 값의 변화를 보여줌 (3)
작은 블롭은 sigma = 3.59에서 극대점, 큰 블롭은 sigma=5.5에서 극대점을 가짐.
(린드버그98)에서 물체 스케일을 s배하는 경우 sigma또한 s배가 된다는 사실을 발견
큰 블롭의 지름(11)/ 작은 블롭의 지름( 7) = 1.57
큰 블롭의 스케일 극대점(5.5)/ 작은 블롭의 스케일 극대점(3.59) = 1.53으로
블롭이 1.5배 커짐에 따라 sigma또한 1.5배 커졌을때 극점을 가지게 됨.

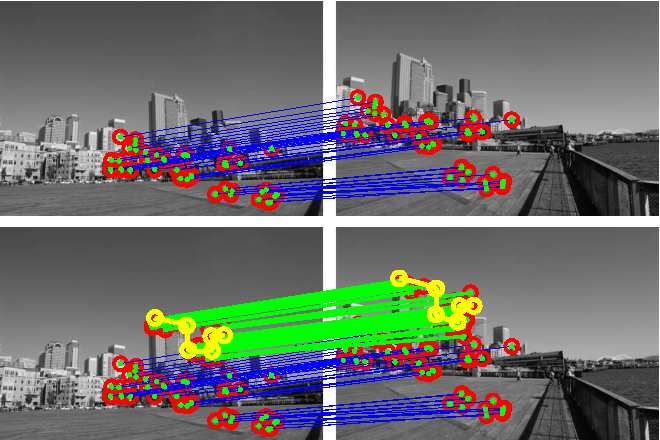
스케일 불변한 특징점의 장점
1. 이동, 회전 불변한 지역 특징의 한계
지난번에 본 특징 검출 방법은 이미지 이동, 회전에 불변한 지역 특징을 검출할 수 있었으나
이미지 크기 변환, 스케일 변화에도 동일한 지역 특징을 검출할수 없는 한계가 있었음.
2. 극복
1) 다중 스케일 공간 y, x, t를 만들고
2) 스케일 변화에 따른 특징의 극점을 구함
이렇게 얻은 극점은 위치 + 스케일 정보를 가짐
=> 이동, 회전, 스케일 불변한 지역 특징
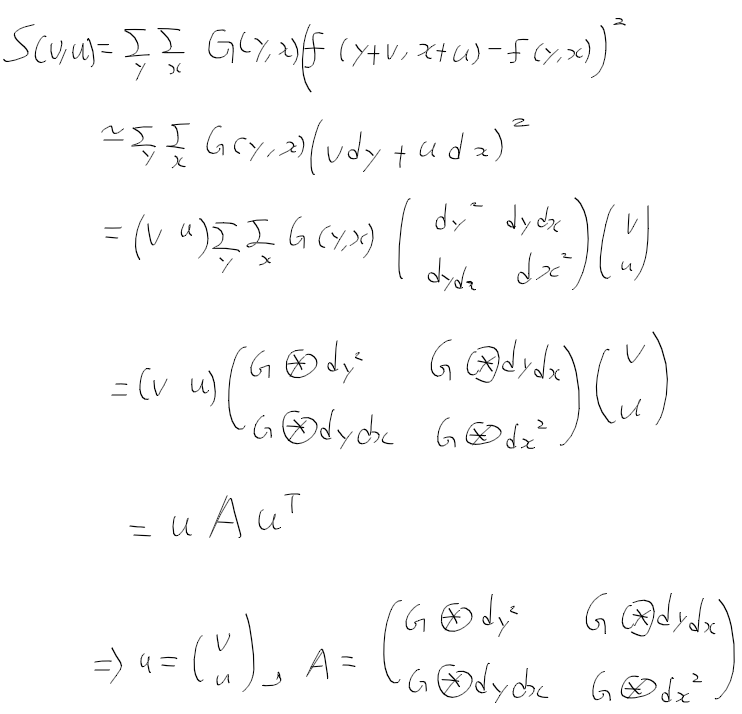
해리스 라플라스 특징 검출
영상 공간 y, x과 스케일 축 t를 분리해서 다룸
영상 공간에는 해리스 코너를

스케일 축에는 정규 라플라시안 적용

하지만 위 해리스 코너 검출 알고리즘은 단일 스케일에 적용되어, 스케일 방향으로 지역극점을 잘 구하지 못함.
기존의 행렬 A를 스케일 공간 확장을 위해 아래와 같이 수정 후

sigma_D를 변화시키면서 해당 스케일의 특징 가능성 값을 구하고,
지역 특징일 가능성이 높은 (y, x, sigma_i)를 모음.

위 과정으로 다중 스케일 공간에서 특징 가능성 맵으로 지역 특징들을 수집.
(1 단계)
2단계는 스케일 선택 단계
1. 스케일 변화에 따른 지역 극점 sigma_new를 구함.
2. 지역 극점을 못구할시 해당 특징 버림
3. 해당 특징 주변에서 새 극점 y_new, x_new를 찾음
4. 현재 극점과 새 극점이 동일 -> 수렴이므로 최종 특징 선정
5. 현재 극점과 새 극점이 다름 위 연산을 반복
'인공지능' 카테고리의 다른 글
| 컴퓨터 비전 & 패턴 인식 - 20. SURF : Speeded Up Robust Feature (0) | 2020.12.14 |
|---|---|
| 컴퓨터 비전 & 패턴 인식 - 19. SIFT (0) | 2020.12.14 |
| 컴퓨터 비전 & 패턴 인식 - 17. 다중 스케일 영상 (0) | 2020.12.14 |
| 컴퓨터 비전 & 패턴 인식 - 16. 이동과 회전 불변한 지역 특징 찾기 (0) | 2020.12.14 |
| 컴퓨터 비전 & 패턴 인식 - 15. 지역 특징과 코너 (0) | 2020.12.14 |