728x90
근 궤적법
- 오차 x 적절한 이득 = 플랜트 입력
- 근궤적법으로 적절한 이득을 쉽게 구할 수 있음
근궤적법 root locust method
- 1948 W.R Evans 개발
- s평면상 개루프 전달함수의 극점, 영점 배치와 시스템 파라미터 값 변화에 따른 폐루프 극점의 위치를 알아내는 그래픽적인 방법
근궤적법 장점
- 시스템 파라미터 값 변화에 따른 폐루프 극점 위치를 s평면상에 신속하게 나타낼수있음
- 폐루프 제어 시스템의 안정도와 과도응답 성능 변화를 시작적으로 파악가능
=> 제어기 설계를 용이하게 적용할수있음
근궤적 개념
- 근궤적 파라미터 : 시스템에서 관심갖는 파라미터
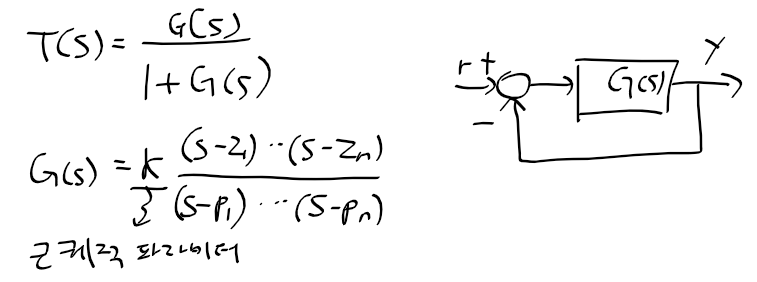
- 폐루프 특성방정식

- 개루프 전달함수 G(s)의 크기와 위상

- 개루프 전달함수 G(s)의 크기 조건식과 위상 조건식을 만족시키는 복소 변수 s
-> 폐루프의 특성방정식
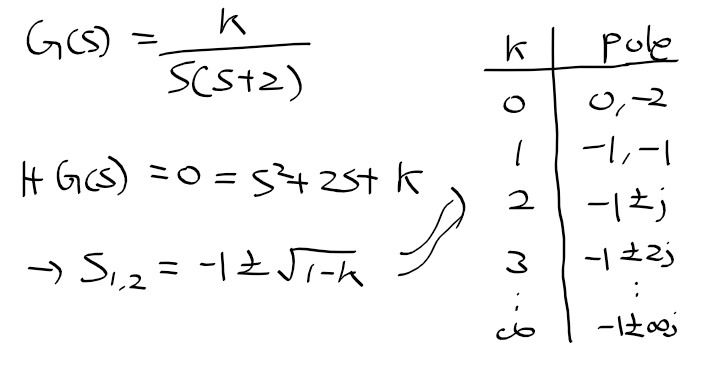
개루프 전달함수의 예시에 따른 폐루프 극점
- k의 변화에 따른 극점의 변화는 우측과 같음
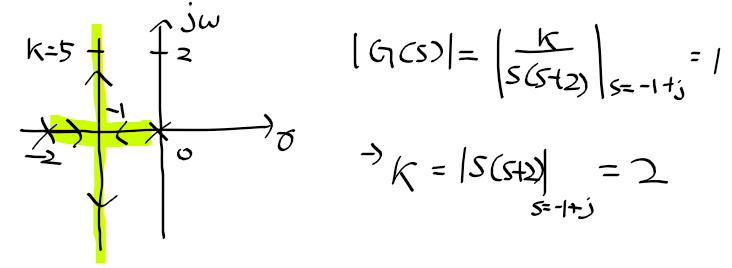
폐루프 극점 s=-1+j에 대응하는 K값(크기 조건식 활용)
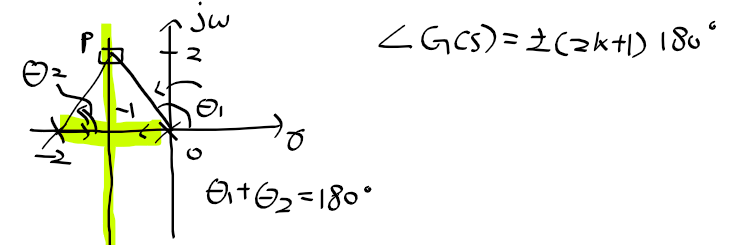
근궤적상 점 p
- 위상 조건식을 만족해야 한다 -> theta_1 + theta_2 = 180
Matlab 상 근궤적 그리기
- 다음 근궤적을 보고 적절한 K 값을 설정해야함


300x250
'로봇 > 제어' 카테고리의 다른 글
| 제어공학 2 - 15 근궤적법을 이용한 비례적분미분 제어기 (0) | 2020.05.10 |
|---|---|
| 제어공학 2 - 14 근궤적법을 이용한 비례제어기 설계 (0) | 2020.05.09 |
| 제어공학 2 -12 비선형 모델링 및 해석 (0) | 2020.05.09 |
| 제어공학 2 - 11 비선형 모델의 선형화 (0) | 2020.05.09 |
| 제어공학 2 - 10 제어성능 및 안정도 평가 (0) | 2020.05.09 |