강체 rigid body
- 형태와 크기가 변하지 않는 단단한 물체
두 강체의 동적 시스템
- 기계 시스템 : 다강체 시스템인 경우가 많음
-> 강체간 상호작용을 이해하는데 필요
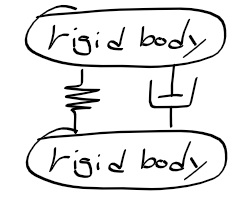
두 강체 동적 시스템 정의
- 두 강체가 스프링 같은 에너지 저장요소와 댐퍼 같은 에너지 소비요소로 연결된 시스템
- 제어 대상이되는 기계시스템은 모델링 할대 둘 또는 그 이상인 다강체 시스템인 경우가 많음
- 두 강체 시스템 모델링은 강체간 상호작용을 이해하는데 중요

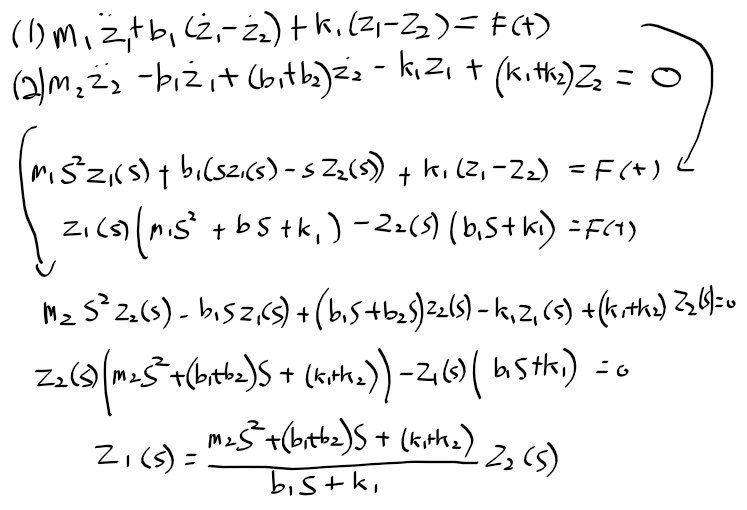
(1) 두 강체 시스템 질량 m1에 가해지는 외력을 입력으로 하고, 두 질량에 대한 운동방정식을 구해보자
1) m1에 대한 자유물체도와 운동역학 선도를 구함
- m1에는 스프링과 댐퍼로부터 힘 F에 반대되는 힘이 작용됨


2) m2에 대한 자유물체도와 운동역학선도
- k1, b1은 m1에 대한 반력이 되나 m2에 대해서는 정방향으로 작용


3) 두식을 정리

4) 라플라스 변환 - 전달함수 구하기
- z1에 대해 정리한 식 2를 식 1에 대입하여 입력 F에 대한 출력 z2의 전달함수를 구할수 있다
-

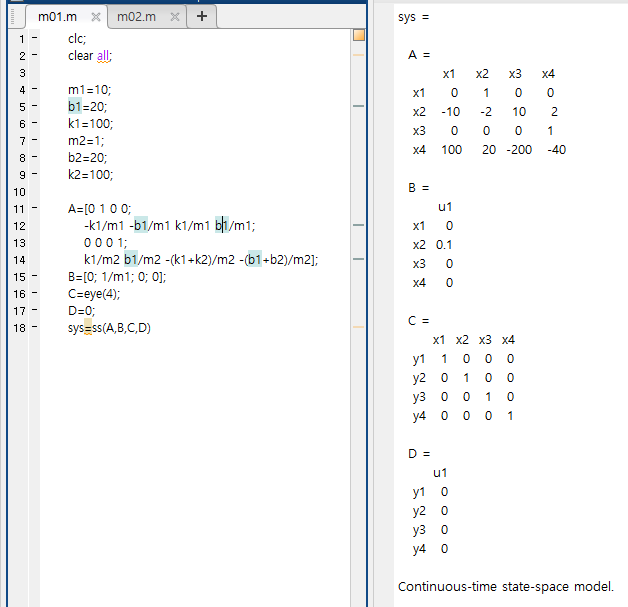
상태 공간을 이용한 시스템 모델링
- 아래의 운동방정식으로 상태 공간으로 시스템 모델링해보자


- 다음의 경우에 대해 상태 공간을 구하자
m1 = 10, b1=20, k1=100, m2=1, b2=20, k2=100
임펄스 응답 구하기
- z1이 감소 감쇄가 보임 -> 0으로 수렴

스탭 응답
- z1는 과소감쇄를 보이며 0.02로 수렴
- z3은 0.01로 수렴

초기 조건이 있는 경우 응답
- z1이 1이고 나머지는 0인 경우 응답 -> z1이 1에 시작하여 제자리로 돌아감

'로봇 > 제어' 카테고리의 다른 글
| 제어공학 2 - 10 제어성능 및 안정도 평가 (0) | 2020.05.09 |
|---|---|
| 제어공학 2 - 9 과도응답 및 정상상태 응답 (0) | 2020.05.09 |
| 제어공학 2 - 6 상태공간 (0) | 2020.05.08 |
| 제어공학 2 - 5 전달함수 (0) | 2020.05.08 |
| 제어공학 2 - MATLAB (0) | 2020.05.08 |