전달함수 Transfer Function
- 선형 시불변 시스템을 주파수 대역에서 해석할수 있도록 입력과 출력사이의 비를 나타내는 식
- s 도메인에서 정의됨
* 모든 초기조건 = 0으로 가정

초기조건을 0으로 하는 이유
- 주파수 응답 해석시 입력에 대한 응답만 필요
- 입력에 대한 특성이나 초기조건에 의한 특성이 동일하기 때문
* 과소 감새의 경우 초기조건이 있으나 없으나 동일한 반응을 보임
전달함수 예시
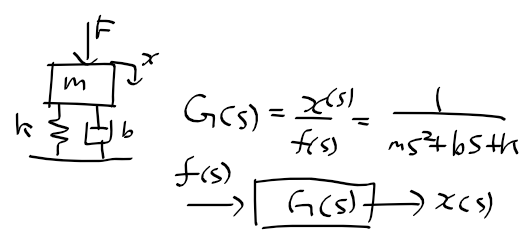
- 질량-스프링-댐퍼 시스템에 외력이 가해지는 경우
-> 전달함수는 외력을 입력, 질량의 변위를 출력

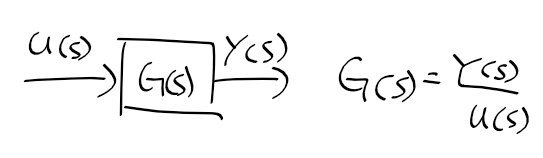
전달함수 G(s) 유도
- 선형 시불변 시스템의 입력, 출력에 대해 다음과 같이 정리한다

전달함수 개념
- 선형 시불변 시스템에서만 정의
- 입/출력 관계를 나타내는 시스템 특성만 나타냄 -> 입력의 크기에 따라 변하지않음
- 입/출력 관계를 나타내므로 단위가 포함됨
- 임펄스 응답에 대해 라플라스 변환으로 구할 수 있음
- 모든 초기조건들을 0으로 가정
- 복소 변수 s의 함수로만 표현
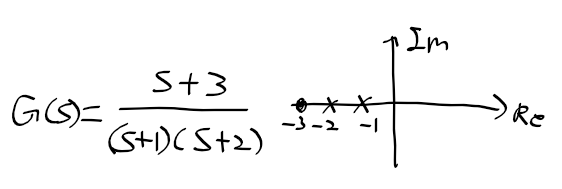
s 평면에서의 극점과 영점
- 극점 x, 영점 0 표기
동적 시스템의 전달함수 구하기
개루프 시스템 전달함수
- 개루프 전달함수를 블록선도로 구하면
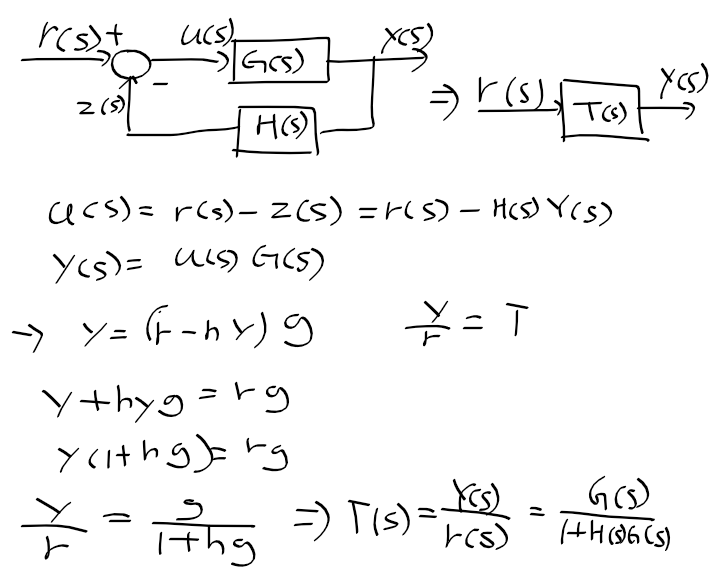
폐루프 시스템 전달함수
질량-스프링-댐퍼시스템. 피드백이 없는 경우
질량-스프링-댐퍼시스템. 피드백이 있는 경우

전달함수를 이용한 시스템 정의
1) 장점
- 전달함수는 s영역에서 이뤄지므로 전달함수를 사용시 특성 방정식 근 위치에 따라 시스템 응답 예측가능
- 주파수 응답 구하는데 용이
- 시스템 동적 특성 예측 가능 -> 전달함수를 안다 = 시스템을 안다
전달 함수 구하기
- 시스템에 임펄스 입력을 줄 때 주파수 응답을 측정하면 전달함수를 구할 수 있다.
Matlab을 이용한 전달함수 구하기
전달함수간 직렬연결
- series(num1,den1, num2, den2) or series(sys1, sys2)
전달함수간 병렬 연결
- parallel(num1, den1, num2, den2) or parallel(sys1, sys2)
피드백 연결
- feedback(num, den, numf, denf, -1) or feedback(sys1, sys2, -1)
* (numf, denf), sys2를 피드백함
* -1은 negative feedback 의미
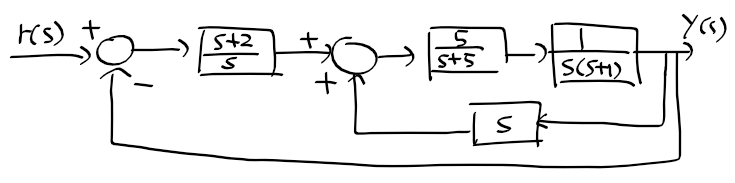
피드벡 제어시스템 전달함수 구하기

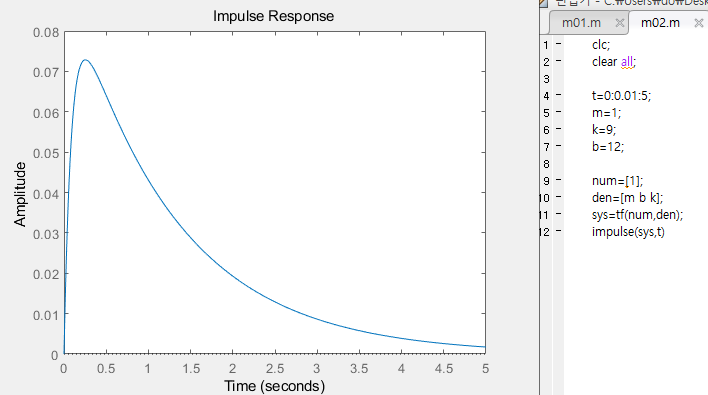
피드백 없는 개루프 전달함수에 외력이 가해지는 경우
- m=1, k=9, b=12, 임펄스 응답
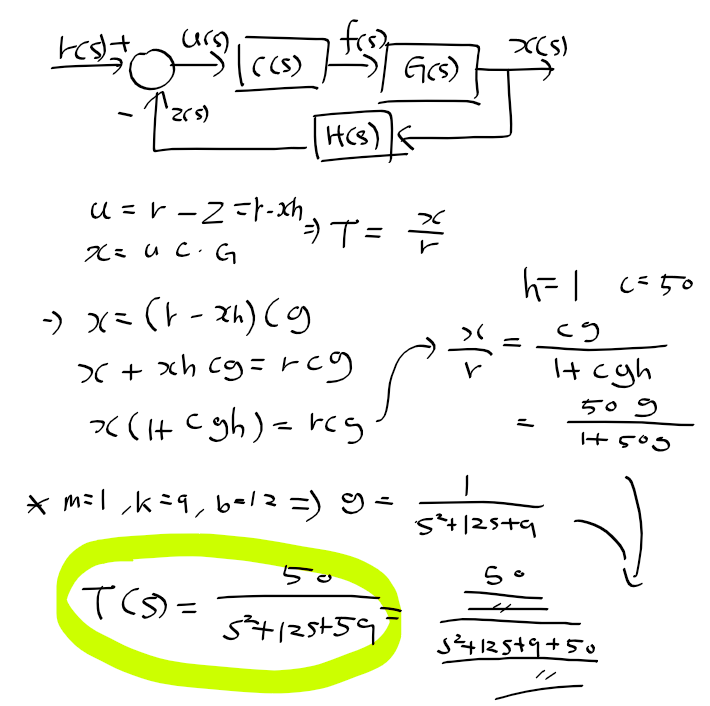
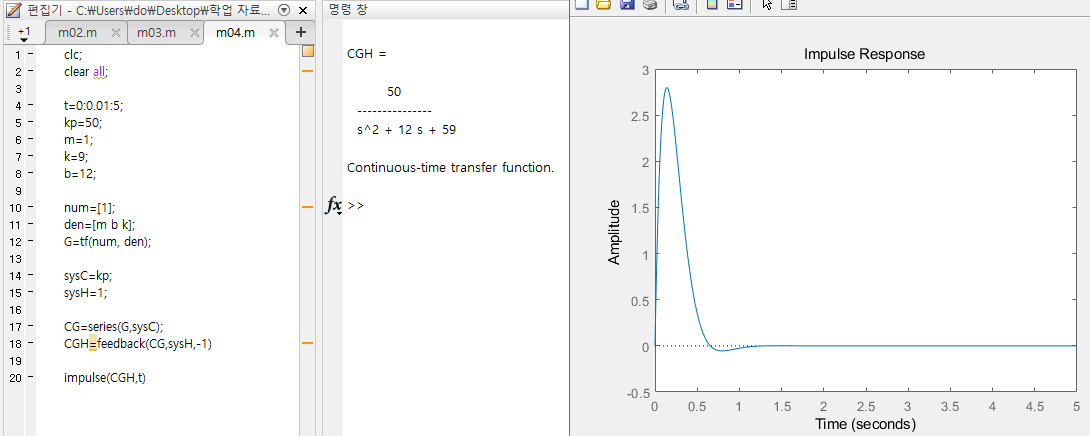
폐루프 시스템에 외력이 가해지는 경우
- m=1, k=9, b=12 / h(s)=1, c(s)=kp=50

'로봇 > 제어' 카테고리의 다른 글
| 제어공학 2 - 7 두 강체의 동적 시스템 (0) | 2020.05.09 |
|---|---|
| 제어공학 2 - 6 상태공간 (0) | 2020.05.08 |
| 제어공학 2 - MATLAB (0) | 2020.05.08 |
| 제어공학 2 - 2 질량-스프링-댐퍼 시스템 (0) | 2020.05.07 |
| 제어공학 2 - 1 제어공학과 동적 시스템 (0) | 2020.05.07 |