역 도립진자에 로터리 엔코더 모터가 필요한건 알겠다.
하지만 이걸 뭘 골라야될까 고민하다가 몇가지 자료를 찾았다.
1. 로터리 엔코더 작동 원리
- 자세히 읽지는 (못)않았지만 사람들의 평이 되게 좋길래 남긴다.
https://elecs.tistory.com/181?category=605348
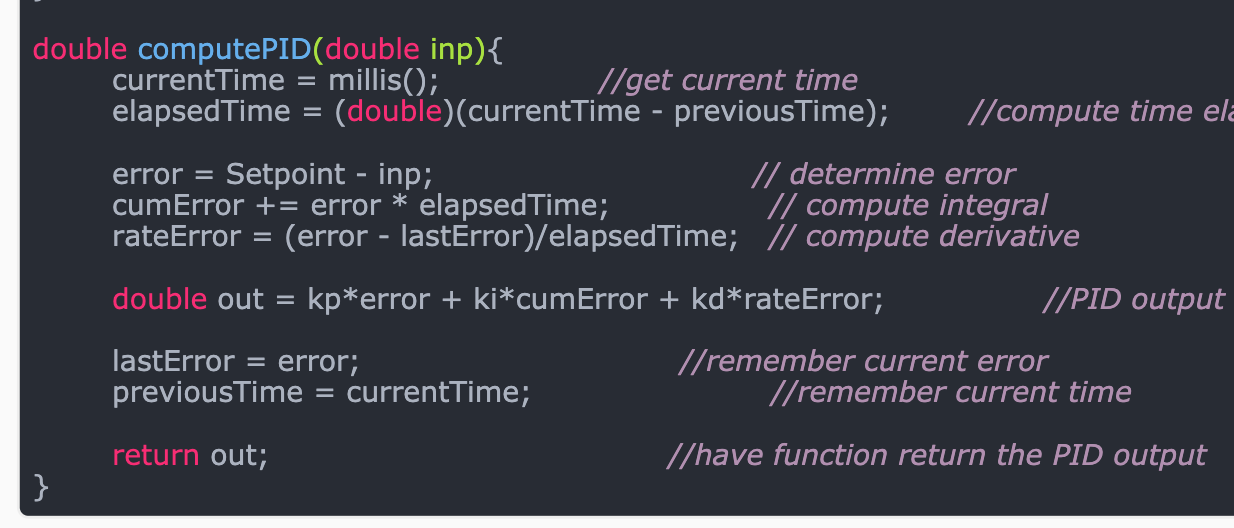
2. 회전 역 도립진자
- 아두이노 메가를 가지고 역 도립진자 만든 자료
https://www.seas.upenn.edu/~jiyuehe/rotary-inverted-pendulum/Encoder.html
- 아깝게도 동영상이 나오는게 하나도 없다..
- 하지만 기본 하드웨어 설정이랑 소스코드 관련 내용을 정리해서 올려주셨더라

- 이 자료를 보니까 팬듈럼 엔코더에다가 짝대기를 달고, 짝대기가 하늘을 가리킬때 입력을
-> 기준입력 r(t) = 0
-> 엔코더 측정 값이 y(t)
-> 오차 e(t) = r(t) - y(t)
=> PID 제어기로 오차를 줄여주도록 u(t) 생성
- 오차가 있으면 어떻게 차가 움직여야 할까..
-> e(t) < 0라면 전진. e(t) > 0는 후진 대강 이런식으로 해야하지 않을까..
-> 오차와 모든 게인들을 정리한 값을 모터 입력으로 사용해주면 될듯하다.

하지만 나는 로터리 엔코더가 없으니 하나 사야될것같다..
대충 준비물 정리
1. 로터리 엔코더 -> x
2. 작대기 -> x
3. 아두이노 우노보드 본체 -> 있음
4. 모터 2개와 모터드라이버, 차량(base) 몸체 -> 있음?
일단 준비물은 정리했으니
로터리 엔코더에서 어떻게 값이 들어오는지 보고
이에 맞게 DC모터 제어하는 방법을 고안해보자 ...
'로봇 > 전기전자&메카' 카테고리의 다른 글
| 프로토타이핑 - 16. 3d 프린터 (0) | 2020.08.17 |
|---|---|
| 프로토타이핑 - 15. 대강 고안 (0) | 2020.08.17 |
| 프로토타이핑 - 13. 로터리 엔코더 (0) | 2020.08.16 |
| 프로토타이핑 - 12. 아두이노 PID 튜토리얼 + PID제어기(wiki) (0) | 2020.08.16 |
| 프로토타이핑 - 11. GEKKO (0) | 2020.08.16 |