1. 소개
운동이나 탐색, 구조, 자동 청소와 같이 이동 로봇을 사용하여 할수있는 많은 작업들을 하기 위해서는 주변의 지도가 필요합니다. 정확한 지도가 사용가능하다면 GPS와 같은 외부 참조 시스템 없이, 내장된 센서만으로 복잡한 환경에서도 동작하는 시스템을 설계할수 있게 됩니다. GPS를 사용할수 없는 실내 환경에서 지도를 얻는 것은 로봇 공학 커뮤니티에서 최근 10년간 주요 관심사가 되어왔습니다.
자세가 불확실한 와중에 지도를 얻는것을 동시적 위치 추정 및 지도작성 SLAM 문제라고도 합니다. 이 문제를 다루기 위한 수많은 방법들이 존재하는데, 이러한 방법들은 필터링이나 스무딩으로 분류할수 있을것같습니다.
1.1 SLAM의 분류
필터링 방법은 이 문제를 현재 로봇 위치와 지도로 이루어진 시스템의 상태들을 온라인으로 추정하는 문제로 설계하는것이고, 대표적인 기술로 칼만 필터와 정보 필터, 파티클 필터 같은게 있습니다. 이들의 증가하는 성질을 강조하기 위해 필터 방법들을 종종 온라인 슬램 방법이라고도 합니다.
반대로 스무딩 방법은 전체 관측치 데이터로부터 로봇의 완전한 궤적을 추정하는 방법이며, 이러한 방법들을 완전 슬램 문제라고도 합니다. 이들은 일반적으로 최소 제곱 오차 최소화 기술들에 의존합니다.
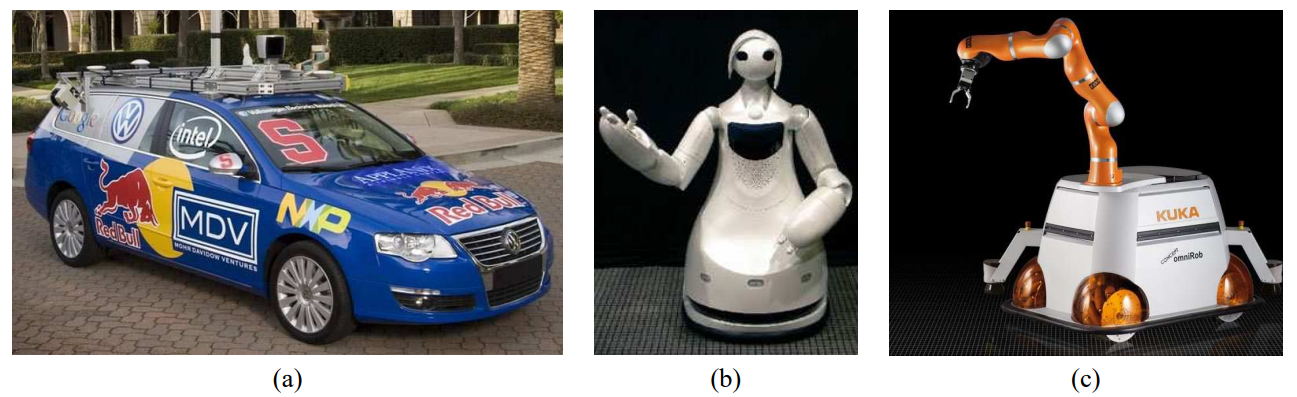
그림 1. SLAM의 응용. (a) 스탠포드대에서 개발한 자율주행차. 이 차는 내장된 센서로만 지도를 작성할 수 있고, 이 지도는 자율 주행에 사용됩니다. (b) 토요타대에서 개발한 박물관 안내 로봇으로, 박물관이 매시간 바뀌면서 새로운 지도를 얻습니다. (c) 매니퓰레이터가 장착된 자율주행 로봇으로, 내장된 센서만을 사용해서 주위 환경에서 동작됩니다.
그림 1은 SLAM 기술을 사용하는 현실에서의 로봇 시스템 예시 3지로 자율주행차와 여행 가이드로봇, 산업용 매니퓰레이션 로봇을 보여주고 있습니다.
'로봇 > SLAM' 카테고리의 다른 글
| 그래프 기반 SLAM 튜토리얼 - 2. SLAM의 확률적 표현 (0) | 2020.07.08 |
|---|---|
| 그래프 기반 SLAM 튜토리얼 - 1. 소개+ (1) | 2020.07.08 |
| 그래프 기반 SLAM 튜토리얼 - 0. 요약 (0) | 2020.07.08 |
| GraphSLAM(thrun) - 1. 소개 (0) | 2020.07.08 |
| GraphSLAM(thrun) - 0. 요약 (0) | 2020.07.08 |