5.3 속도 동작 모델 velocity motion model
속도 동작 모델은 로봇을 2개의 속도 회전과 평행이동 속도로 제어한다고 가정하며, 대부분의 상업 로봇들이 속도를 이용한 제어 인터페이스를 제공하고 있습니다. 기차 구동 시에는 차동 구동, 애커맨 구동, 동기 구동, 다른 홀로노믹 구동 등의 방법들로 제어되며, 구동 시스템은 논 홀로노믹 제약 없이 이 모델을 적용시킬수가 없게 됩니다.
이제 평행이동 속도를 $v_t$라 하고, 회전 속도를 $\omega_t$라 할때 다음 식을 얻을 수 있습니다.

여기서 양의 회전 속도 $\omega_t$는 시계 반대 방향으로 (왼쪽으로)회전을 하며, 양의 평행이동 속도 $v_t$는 전진 운동을 수행합니다.
5.3.1 닫힌 폼 계산 closed form calculation
확률 p($x_t$ | $u_t$, $x_{t-1}$)을 계산하기 위한 알고리즘은 표 5.1과 같습니다. 입력으로 초기 위치 $x_{t-1}$ = (x y $\theta$ $)^T$와 제어 $u_t$ = (v, $\omega$ $)^T$, 가정 자세 hypothesized successor pose $x_t$ = ($x^'$ $y^'$ $\theta^'$ $)^T가 됩니다. 이 알고리즘의 출력은 상태 $x_{t-1}$에서 제어 $u_t$를 수행한 후에 $x_t$로 확률 p($x_t$ | $u_t$, $x_{t-1}$)가 됩니다. 여기서 파라미터 $\alpha_1$ ~ $\alpha_6$은 로봇의 동작 에러 파라미터이며, $\hat{v}$, $\hat{\omega}$로 다루겠습니다.
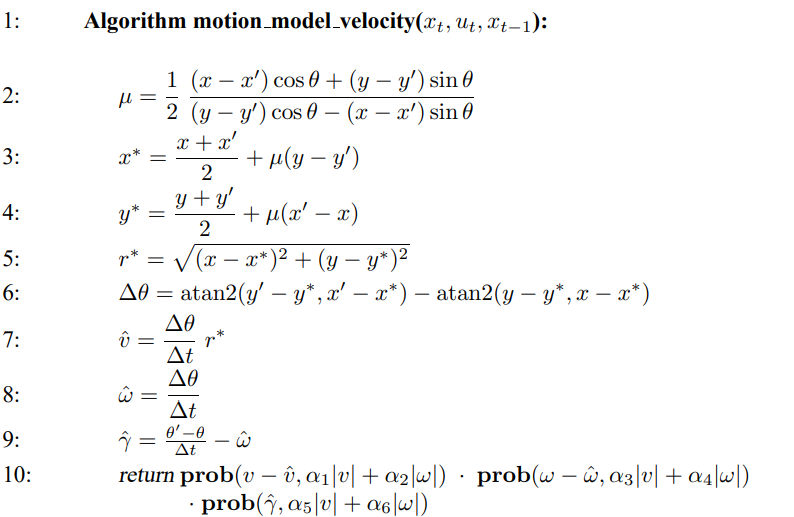
- 여기서 $x_{t-1}$은 벡터 (x y $\theta$ $)^T이고 $x_t$는 ($x^'$ $y^'$ $\theta^'$ $)^T, 제어 $u_t$ = (v, $\omega$ $)^T$입니다. 함수 prob(a, b)는 분산이 b인 0평균 분포를 따르는 a의 확률을 계산하며 이를 표 5.2로 계산할 수 있습니다.

함수 prob(x, b)는 모션 에러를 나타내는데, 분포가 b인 0 평균 확률변수로 x의 확률을 나타냅니다. 두 가지 구현 예시는 표 5.2에서 보여주며 에러 변수들은 각각 정규분포와 삼각 분포를 따르게 됩니다.

그림 5.3은 이 속도 모델의 예시로 x-y 공간 상에 사영되었는데, 이 모든 경우에 로봇은 같은 평행 각속도를 설정하였습니다. 그림 5.3a는 기존 에러 파라미터 $\alpha_1$ ~ $\alpha_6$가 주어질때 결과 분포이며, 그림 5.3b의 분포는 각 속도 에러(파라미터 $\alpha_3$, $\alpha_4$)가 더 작고, 평행이동 에러가 더 큰 경우(파라미터 $\alpha_1$, $\alpha_2$) 경우나오는 분포가 됩니다. 그림 5.3c는 각 에러가 크고 평행이동 에러가 작은 경우의 분포가 됩니다.
'번역 > 구)확률적로봇공학' 카테고리의 다른 글
| 확률적 로봇 공학 - 5.4 오도메트리 동작 모델 (0) | 2020.06.23 |
|---|---|
| 확률적 로봇 공학 - 5.3.2 샘플링 알고리즘 (0) | 2020.06.23 |
| 확률적 로봇 공학 - 5 로봇 동작 (0) | 2020.06.22 |
| 확률적 로봇공학 - 4.2.2 중요도 샘플링 (0) | 2020.06.22 |
| 확률적 로봇공학 - 4.2 파티클 필터 (0) | 2020.06.22 |