4.2 파티클 필터
4.2.1 기본 알고리즘
파티클 필터는 배이즈 필터의 비모수적 구현으로 히스토 그램처럼 유한 개의 파라미터로 사후 확률을 근사화 시키지만 상태 공간 상에서 파라미터를 생성시키는 방법이 다릅니다. 파티클 필터의 키 아이디어는 사후 확률 bel($x_t$)를 이 사후 확률로부터 생성한 임의의 상태 샘플 집합으로 나타내는것입니다.

- 우측 아래 그림은 가우시안 확률 변수 X로 샘플을 생성한 그래프로 이 샘플들은 우측 위 비선형 함수에 적용되어 결과 샘플들은 확률 변수 Y에 대해 분포됨.
그림 4.3은 가우시안을 이용한 이 개념에 대해 설명하고 있습니다. 모수적 형태의 분포를 사용하는 대신 파티클 필터는 이 분포로부터 샘플 집합을 생성하여 이 분포를 표현합니다. 이러한 표현법은 근사화 된것이나 비모수적이고, 가우시안보다 넓은 분포 공간에서 나타낼 수 있습니다.
파티클 필터에서 사후확률 분포의 샘플들을 파티클 particles이라 부르며 다음과 같이 적습니다.

각각의 파티클 $x_{t}^{[m]}$ (1 <= m <= M)은 시간 t에 대한 상태의 인스턴스로 실제 상태에 대한 가정이 됩니다. 여기서 M은 파티클 집합 $\chi_t$에서 파티클의 개수로 보통 M = 1000이 됩니다.
파티클 필터는 파티클 집합 $\chi_t$의 집합으로 신뢰도 bel($x_t$)를 근사화 시키며, 파티클 집합 $\chi_t$에 존재하는 상태 가정 $x_t$의 우도는 베이즈 필터의 사후 확률 bel($x_t$)에 비례하게 됩니다.

(4.23)에 따라 상태 공간의 하부 영역이 샘플들로 밀집될수록 이 공간이 실제 상태에 가깝게 되어집니다. 유한한 M에 따라서 파티클들은 조금씩 다르게 분포될수 있지만, 파티클의 수가 너무 적지 않으면(M >= 100)은 이 차이는 무시해도 됩니다.
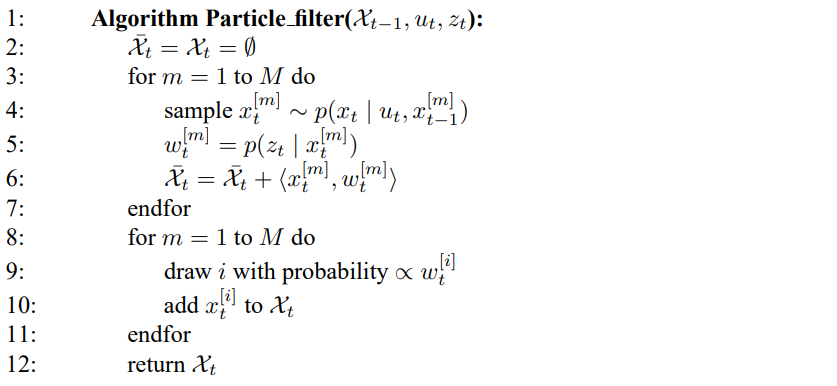
이전에 살펴본 다른 베이즈 필터와 달리 파티클 필터 알고리즘은 신뢰도 bel($x_t$)를 이전 신뢰도 bel($x_{t-1}$)로부터 재귀적으로 만들며, 신뢰도들은 파티클의 집합으로 나타내기 때문에 이는 파티클 필터가 이전 집합 $\chi_{t-1}$로부터 재귀적으로 파티클 집합 $\chi_t$를 만든다고 할 수 있습니다. 파티클 필터의 기본 알고리즘은 표 4.3과 같습니다.
이 알고리즘의 입력은 파트클 집합 $\chi_t-1$와 입력 $u_t$, 관측 $z_t$을 사용합니다. 처음에는 $\bar{bel}(X_t)$에 대응하는 임시 파티클 집합 $\bar{\chi}$를 생성합니다. 이는 입력 파티클 집합 $\chi_{t-1}$에서 각각의 파티클 $x_{t-1}^{[m]}$을 아래의 과정처럼 처리하여 수행됩니다.
1. 4번째 줄에서는 파티클 $x_{t-1}^{[m]}$과 제어 $u_t$로 시간 t에 대한 상태 가정 $x_{t}^{[m]}$을 생성합니다. 결과 샘플은 m으로 인덱싱하는데, $\chi_{t-1}$의 m번째 파티클에서 만들어 졌음을 나타냅니다. 이 단계에서 상태 전이 확률 p($x_t$ | $u_t$, $x_{t-1}$)으로 샘플링을 포함하므로 이 단계를 구현하기 위해 p($x_t$ | $u_t$, $x_{t-1}$)에서의 샘플링이 되어야 합니다. 상태 전이 확률로 부터 샘플링 시에는 p($x_t$ | $u_t$, $x_{t-1}$)만 사용되는 것은 아니며 이 책에서의 많은 분포들이 샘플 생성을 위해 효율적인 알고리즘들을 가지고 있습니다. 이 과정들이 M번 반복이 되어만든 파티클 집합이 이 필터의 $\bar{bel}(x_t)$가 됩니다.
2. 5번째 줄에서는 각각의 파티클 $x_{t}^{[m]}$의 가중치 요소 $w_{t}^{[m]}$ importance factor을 계산합니다. 가중치 요소는 측정 $z_t$를 파티클 집합에 적용시킬때 사용되는데, 이는 파티클 $x_{t}^{[m]}$에 대한 측정 $z_t$의 확률로 $w_{t}$ = p($z_t$ | $x_{t}^{[m]}$)이 됩니다. $w_{t}$를 파티클의 가중치로 본다면 가중치가 적용된 파티클들의 집합은 베이즈 필터 사후확률 bel($x_t$)라고 볼수 있습니다.
3. 파티클 필터 알고리즘의 실제 트릭은 8~11번째 줄에서 수행됩니다. 이 세 줄은 리샘플링 or 가중치 리샘플링을 구현한 것으로 임시 파티클 집합 $\bar{\chi_t}$로부터 M개의 파티클을 대체시키게 됩니다. 중요도 가중치에의해 각 파티클들의 확률이 주어지면, 리샘플링 과정에서 기존의 M개 파티클 집합을 동일한 크기의 다른 파티클 집합으로 변환시킵니다. 이 중요도 가중치를 리샘플링 과정에 적용함으로서 파티클의 분포가 변하게 되는데, 리샘플링 전에 파티클 집합은 $\bar{bel}$($x_t$)를 따랐다면 리샘플링을 수행한 이후에는 사후 확률 bel($x_t$) = $\eta$ p($z_t$ | $x_{t}^{[m]}$) $\bar{bel}$($x_t$)를 따르게 됩니다. 파티클들이 대체 되었기 때문에 결과 파티클 집합은 많은 복제된 파티클들을 가지게 됩니다. 더 중요한 점은 $\chi_t$에 포함되지 않은 파티클들은 적은 중요도 가중치를 가지는 경향이 있습니다.
리샘플링 단계는 파티클들을 사후 확률 bel($x_t$)를 만드는 중요한 함수이며, 각각의 파티클의 중요도 가중치는 1로 초기화되어 곱이 수행됩니다.

파티클 필터 알고리즘은 사후확률을 근사화 시키나 수많은 파티클들이 사후확률이 낮은 영역에 머무르게 됩니다. 그 결과 더 많은 파티클들이 필요하게 되는데 이는 사후확률의 형태에 따라 정해집니다. 리샘플링 단계는 적자생존 survival of the fittest 의 확률적인 구현으로 높은 사후 확률 역역에 존재하는 파티클 집합을 중심으로 만듭니다. 이렇게 함으로서 상태 공간 상에 문제를 다루는 영역에 한하여 필터 알고리즘의 자원 사용을 적용하게 됩니다.
'번역 > 구)확률적로봇공학' 카테고리의 다른 글
| 확률적 로봇 공학 - 5 로봇 동작 (0) | 2020.06.22 |
|---|---|
| 확률적 로봇공학 - 4.2.2 중요도 샘플링 (0) | 2020.06.22 |
| 확률적 로봇공학 - 4.1.4 정적 상태와 이진 베이즈 필터 (0) | 2020.06.22 |
| 확률적 로봇공학 - 4 비모수적 필터 (0) | 2020.06.22 |
| 확률적 로봇공학 - 3.3 ~ 확장 칼만 필터 (0) | 2020.06.22 |