728x90
function drawAircraftt(uu)
% process inputs to function
pn = uu(1); % inertial North position
pe = uu(2); % inertial East position
pd = uu(3);
u = uu(4);
v = uu(5);
w = uu(6);
phi = uu(7); % roll angle
theta = uu(8); % pitch angle
psi = uu(9); % yaw angle
p = uu(10); % roll rate
q = uu(11); % pitch rate
r = uu(12); % yaw rate
t = uu(13); % time
% define persistent variables
persistent aircraft_handle;
persistent Vertices
persistent Faces
persistent facecolors
% first time function is called, initialize plot and persistent vars
if t==0
figure(1), clf
[Vertices, Faces, facecolors] = defineAircraft;
aircraft_handle = drawAircraftBody(Vertices,Faces,facecolors,...
pn,pe,pd,phi,theta,psi,...
[],'normal');
title('Aircraft')
xlabel('East')
ylabel('North')
zlabel('-Down')
view(32,47) % set the vieew angle for figure
axis([-500,500,-500,500,-500,500]);
hold on
% at every other time step, redraw base and rod
else
drawAircraftBody(Vertices,Faces,facecolors,...
pn,pe,pd,phi,theta,psi,...
aircraft_handle);
end
end
%=======================================================================
% drawAircraft
% return handle if 3rd argument is empty, otherwise use 3rd arg as handle
%=======================================================================
%
function handle = drawAircraftBody(V,F,patchcolors,...
pn,pe,pd,phi,theta,psi,...
handle,mode)
V = rotate(V', phi, theta, psi); % rotate Aircraft
V = translate(V, pn, pe, pd); % translate Aircraft
% transform vertices from NED to XYZ (for matlab rendering)
R = [...
0, 1, 0;...
1, 0, 0;...
0, 0, -1;...
];
V = V'*R;
if isempty(handle)
handle = patch('Vertices', V, 'Faces', F,...
'FaceVertexCData',patchcolors,...
'FaceColor','flat',...
'EraseMode', mode);
grid on;
else
set(handle,'Vertices',V,'Faces',F);
drawnow
end
end
%%%%%%%%%%%%%%%%%%%%%%%
function XYZ=rotate(XYZ,phi,theta,psi)
% define rotation matrix
R_roll = [...
1, 0, 0;...
0, cos(phi), -sin(phi);...
0, sin(phi), cos(phi)];
R_pitch = [...
cos(theta), 0, sin(theta);...
0, 1, 0;...
-sin(theta), 0, cos(theta)];
R_yaw = [...
cos(psi), -sin(psi), 0;...
sin(psi), cos(psi), 0;...
0, 0, 1];
R = R_roll*R_pitch*R_yaw;
% rotate vertices
XYZ = R*XYZ;
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% translate vertices by pn, pe, pd
function XYZ = translate(XYZ,pn,pe,pd)
XYZ = XYZ + repmat([pn;pe;pd],1,size(XYZ,2));
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% define aircraft vertices and faces
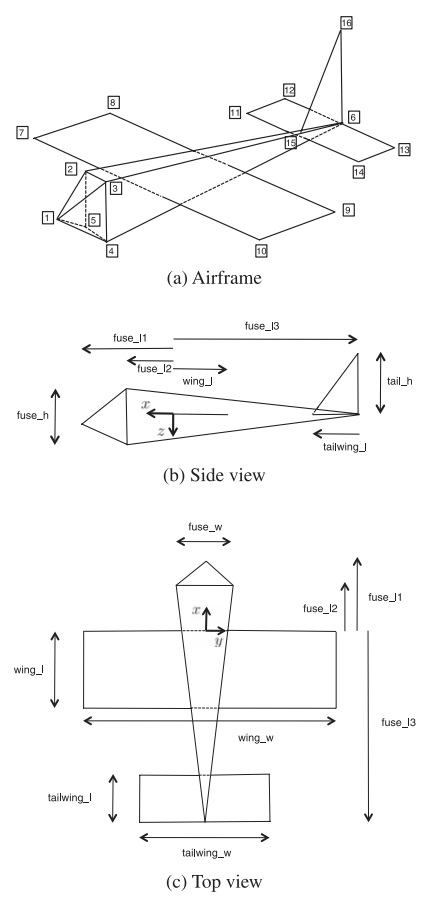
function [V,F,facecolors] = defineAircraft()
% Define the vertices (physical location of vertices
V = [...
75, 0, 0;... % pt 1
50, 25, -25;... % pt 2
50, -25, -25;... % pt 3
50, -25, 25;... % pt 4
50, 25, 25;... % pt 5
-225, 0, 0;... % pt 6
0, 125, 0;... % pt 7
-50, 125, 0;... % pt 8
-50, -125, 0;... % pt 9
0, -125, 0;... % pt 10
-187.5, 75, 0;... % pt 11
-225, 75, 0;... % pt 12
-225, -75, 0;... % pt 13
-187.5, -75, 0;... % pt 14
-187.5, 0, 0;... % pt 15
-225, 0, -62.5;... % pt 16
];
% define faces as a list of vertices numbered above
F = [...
1, 1, 2, 5;... % nose right
1, 1, 3, 4;... % nose left
1, 1, 2, 3;... % nose upper
1, 1, 4, 5;... % nose bottom
2, 5, 6, 6;... % fuselage right
3, 4, 6, 6;... % fuselage left
2, 3, 6, 6;... % fuselage upper
4, 5, 6, 6;... % fuselage bottom
7, 8, 9, 10;... % wing
11, 12, 13, 14;... % horizontal tail
6, 15, 16, 6;... % vertical tail
];
% define colors for each face
myred = [1, 0, 0];
mygreen = [0, 1, 0];
myblue = [0, 0, 1];
myyellow = [1, 1, 0];
mycyan = [0, 1, 1];
facecolors = [...
myyellow;... % nose right
myyellow;... % nose left
myyellow;... % nose upper
myyellow;... % nose bottom
myblue;... % fuselage right
myblue;... % fuselage left
myblue;... % fuselage upper
myred;... % fuselage bottom
mygreen;... % wing
mygreen;... % horizontal tail
myblue;... % vertical tail
];
end
300x250
'로봇 > 제어' 카테고리의 다른 글
| 소형 무인 비행체 3 - 과제 (0) | 2020.06.04 |
|---|---|
| 시뮬링크에서 s 함수로 모델링하기 (0) | 2020.06.04 |
| 소형 무인 비행체 2 - 과제 (0) | 2020.06.02 |
| 소형 무인 비행체 6 - 연속 폐 루프로 오토파일럿 설계하기2 (0) | 2020.06.01 |
| 소형 무인 비행체 6 - 연속 폐 루프로 오토파일럿 설계하기 (0) | 2020.06.01 |