이번장은 매트랩/시뮬링크 환경에 익숙한 사람들을 대상으로 진행하겠습니다. 다세한 정보는 매트랩/시뮬링크 문서를 참조해주시기 바랍니다. 시뮬링크는 상미분 방정식 사이 연결을 푸는대 필수적인 도구입니다.
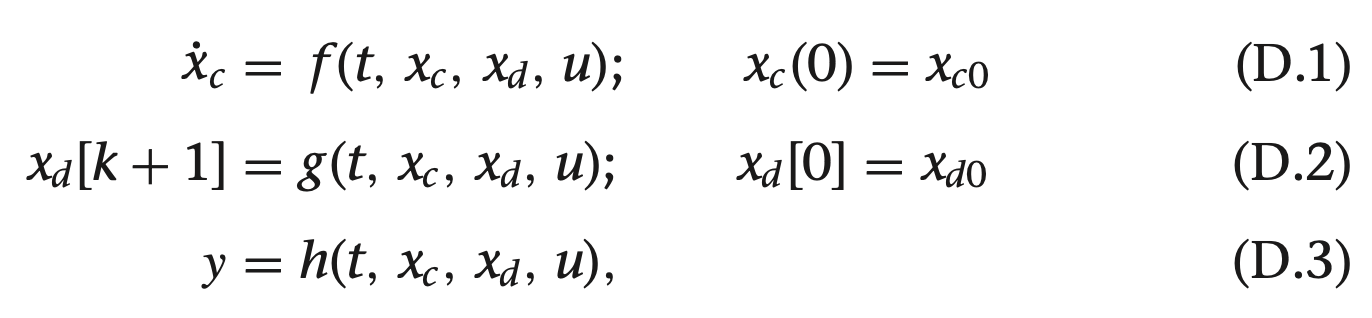
시뮬링크 각각의 블록들이 다음의 구조대로 되어있다고 가정해봅시다. 여기서 $x_c$ $\in$ $\mathbb{R}$은 초기 조건이 $x_{c0}$인 연속 상태이고, $x_d$ $\in$ $\mathbb{R}^{n_d}$는 초기 조건이 $x_{d0}$인 이산 상태, u $\in$ $\mathbb{R}^m$는 블록 입력, y $\in$ $\mathbb{R}^p$는 블록의 출력이며, t는 시뮬레이션 경과 시간을 의미합니다.
s 함수는 다양한 방법으로 정의 가능한 시뮬링크 도구로 여기서 2가지 방법인 레벨 1 m file s함수와 C파일 s 함수에 대해 간단하게 살펴보겠습니다. c 파일 s 함수는 c코드로 컴파일되서 m 파일 s함수 보다 빠르게 실해오딥니다.
D.1 예시 : 2차 미분 방정식
이 장에서는 표준 2차 전달함수로 시스템을 구현하는 과정을 살펴보겠는데 여기서 레벨 1 m 파일 s 함수와 c 파일 s 함수를 사용하겠습니다.

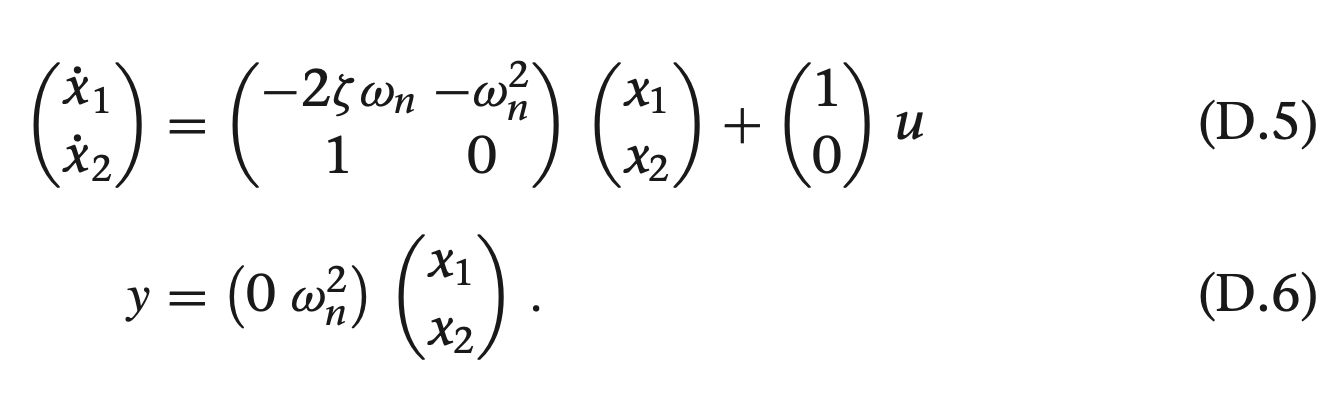
우선 식 (D.4)를 상태 공간상에 표현하겠습니다. 제어 표준 형태 control canonical form로 나타내면
D.1.1 레벨 1 m 파일 s 함수
식 d.5, d.6을 시스템으로 구현하는 m 파일 s 함수 코드는 아래와 같습니다.
function [sys,x0,str,ts] = second_order_m(t,x,u,flag, zeta,wn)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
% initialize block
case 1,
sys=mdlDerivatives(t,x,u,zeta,wn);
% define xdot = f(t,x,u)
case 3,
sys=mdlOutputs(t,x,u,wn);
% define xup = g(t,x,u)
otherwise,
sys = [];
end
%==========================================================%
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 2;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 1;
sizes.DirFeedthrough = 0;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [0; 0]; % define initial conditions
str = []; % str is always an empty matrix
% initialize the array of sample times
ts = [0 0]; % continuous sample time
%==========================================================%
function xdot=mdlDerivatives(t,x,u,zeta,wn)
xdot(1) = −2*zeta*wn*x(1) − wn^2*x(2) + u;
xdot(2) = x(1);
%==========================================================%
function y=mdlOutputs(t,x,u,wn)
y = wn^2*x(2);
여기서 첫 줄은 m 파일 함수를 정의하는 부분이 됩니다. 이 함수의 입력은 항상 경과 시간 t, 상태 x(연속 상태와 이산 상태를 연결한), 입력 u, 와 플래그는 기본적으로 있어야 하며, 사용자 정의 입력 파라미터를 추가할 수도 있습니다. 이번 경우에는 $\zeta$와 $\omega_n$을 사용하겠씁니다.
시뮬링크 엔진은 s 함수를 호출하고 t, x, u, flag를 파라미터로 전달시키는데 flag == 0인경우 시뮬링크 엔진은 sys 구조체를 반환합니다. 여기서 sys 구조체는 초기 상태 x0, 빈 문자열 str, 샘플 타임배열인 ts로 구서오딥니다.
flag == 1인 경우 시뮬링크 엔진은 f(t, x, u) 함수를 반환하고, flag == 2일때는 g(t, x, u), flag==3 일때는 h(t, x, u)를 반환합니다.
스위치 문은 flag를 이용해서 적절한 함수를 호출하게 되는데, 초기화 구문을 살펴보면 연속 상태의 수, 이산 상태의 수, 출력 수, 입력의 수를 정의 합니다. 그리고, 출력을 입력으로 피드백 시킬것인지의 여부를 지정할 수도 있습니다.
'로봇 > 제어' 카테고리의 다른 글
| 소형 무인 비행체 4 - 과제 2 (0) | 2020.06.04 |
|---|---|
| 소형 무인 비행체 3 - 과제 (0) | 2020.06.04 |
| 소형 무인 비행체 2 - 과제 2 (0) | 2020.06.02 |
| 소형 무인 비행체 2 - 과제 (0) | 2020.06.02 |
| 소형 무인 비행체 6 - 연속 폐 루프로 오토파일럿 설계하기2 (0) | 2020.06.01 |