728x90
ref : https://throwexception.tistory.com/838?category=873104
import numpy as np
import cv2
from matplotlib import pyplot as plt
# Initiate
MIN_MATCH_COUNT = 10
cap = cv2.VideoCapture(0)
#FLANN Feature Matcher & Param
index_params = dict(algorithm=6,
table_number=6,
key_size=12,
multi_probe_level=2)
search_params = {}
flann = cv2.FlannBasedMatcher(index_params, search_params)
# Initiate STAR detector
orb = cv2.ORB_create()
img1 = cv2.imread('../../../res/manual.png',0)
# find the keypoints with ORB
kp1 = orb.detect(img1,None)
kp1, des1 = orb.compute(img1, kp1)
while(True):
ret, frame = cap.read()
frame = cv2.flip(frame, -1)
rsz = cv2.resize(frame, dsize=(320,240))
res = cv2.cvtColor(rsz, cv2.COLOR_BGR2GRAY)
kp2 = orb.detect(res,None)
kp2, des2 = orb.compute(res, kp2)
try:
matches = flann.knnMatch(des1, des2, k=2)
good = []
for i,(m,n) in enumerate(matches):
if m.distance < 0.85*n.distance:
good.append(m)
if len(good)>MIN_MATCH_COUNT:
src_pts = np.float32([ kp1[m.queryIdx].pt for m in good ]).reshape(-1,1,2)
dst_pts = np.float32([ kp2[m.trainIdx].pt for m in good ]).reshape(-1,1,2)
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC,5.0)
matchesMask = mask.ravel().tolist()
h,w = img1.shape
pts = np.float32([ [0,0],[0,h-1],[w-1,h-1],[w-1,0] ]).reshape(-1,1,2)
dst = cv2.perspectiveTransform(pts,M)
res = cv2.polylines(res,[np.int32(dst)],True,255,3, cv2.LINE_AA)
else:
#print("Not enough matches are found - %d/%d" % (len(good),MIN_MATCH_COUNT))
matchesMask = None
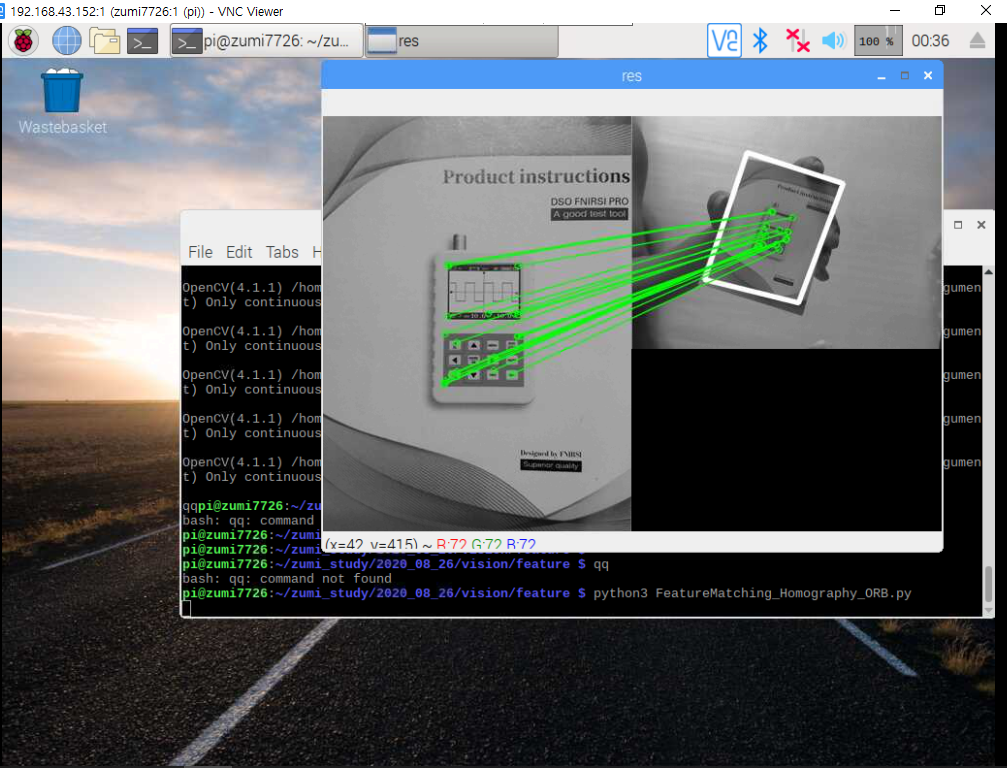
draw_params = dict(matchColor = (0,255,0), # draw matches in green color
singlePointColor = None,
matchesMask = matchesMask, # draw only inliers
flags = 2)
res = cv2.drawMatches(img1,kp1,res,kp2,good,None,**draw_params)
except Exception as e:
print(e)
cv2.imshow('res',res)
if cv2.waitKey(20) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
300x250
'로봇 > 로봇' 카테고리의 다른 글
| zumi - 30. monoVo-python 분석, 수정하기 fail (0) | 2020.08.28 |
|---|---|
| zumi - 29. 카메라 캘리브레이션과 왜곡 보정 (0) | 2020.08.28 |
| zumi - 27. ORB 특징, 브루트포스 매처를 이용한 피처 매칭 (0) | 2020.08.28 |
| zumi - 26. pi에서 빌드없이 opencv 설치하기 (0) | 2020.08.28 |
| zumi - 25. mpu6050 가속도계로 속도, 위치 구하기 fail (0) | 2020.08.28 |