특징점의 필요성
- 대응점 찾기 correspondence나 매칭 문제에서 특징점이 필요
- 입력영상에섯 꼭지점들이 주로 특징점으로 사용됨
- 이러한 특징점들은 영상에서 변환이 일어나도 검출 할 수 있어야 함.
지역 특징 local feature
- 구성 요소 : 스케일, 위치, 방향 특징 벡터 등
- 검출 단계에서 스케일과 위치, 기술 단계에서 방향과 특징 벡터를 구함
지역 특징의 특성
- 분별력 : 영상의 다른 부분들과 구분 가능해야함
- 반복성 : 비슷 한 영상에서 동일하게 검출가능해야함
- 지역성 : 다른 물체로 가려지는 상황에 대처할 수 있도록 특정 지점에서 지역적이여야 함
- 계산 효율 : 빠른 시간에 수행해야함
모라벡 알고리즘
- 입력 영상과 마스크(특정 픽셀의 상하좌우 4방향)가 주어질 때, 제곱차합(SSD) S(v, u) 맵 계산
- S(v, u) 맵이 수직이나 수평 방향으로 값을 가진다 -> 에지
- S(v, u) 맵이 모든 방향으로 값이 크다 -> 특징
=> but. 노이즈나 회전시 대각선 방향에서 찾을수 없음
해리스 코너
- 모라벡 알고리즘에서 노이즈 대처할 수 있도록 가우시안 마스크를 사용.
- 입력 영상과 마스크(가우시안)이 주어질 때 가중치 제곱차합(WSSD)로 S(v,u)맵 계산
- 태일러 전개를 통해 각 방향에 대한 미분 영상 획득
=> 가우시안 마스크와 미분 영상들을 컨볼루션하여 2차 모멘트 행렬 구함
- 2차 모멘트 행렬의 고유치로 특징 여부를 계산 가능
- 아래의 이미지는 opencv의 해리스 코너 검출기로 검출한 특징 결과

비최대 억제 non-maximum suprresion
- 지역 특징을 제외한 지점들을 억제시키는 방법
- 특징 계산시 : 모라벡 알고리즘, 해리스 알고리즘, LOG 등 선정하여 사용
- 특징 가능성 지도로 특징점 찾기 가능
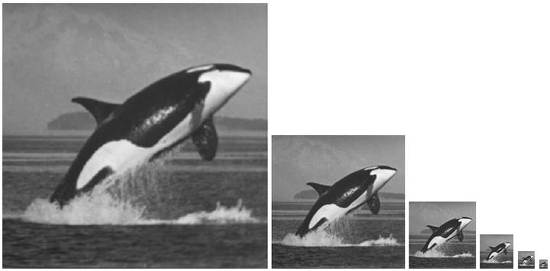
스케일에 강인한 특징
- 원본 영상의 다양한 크기(다중 스케일 영상)에서 검출 가능한 특징 + 다양한 표준 편차로 가우시안 스무딩 적용
- 가우시안 피라미드
그라디언트, 라플라시안, 헤시안
- 그라디언트 : 1함수(영상), 다변수 미분

- 자코비안 : 다함수, 다변수 미분

- 헤시안 : 다함수, 다변수 2차 미분

- 라플라시안 : 함수의 2차 편미분들의 합

그라디언트의 크기와 방향 영상 비교
- 그라디언트의 크기 영상과, 그라디언트의 방향 영상

원본 영상, 라플라시안 영상, 그라디언트 크기 영상 비교
- 라플라시안 영상 : x축 2차미분, y축 2차 미분 영상들의 합
- 그라디언트 크기 영상 : x축 1차 미분, y축 1차 미분 영상의 유클리디안 노름

'로봇 > 영상' 카테고리의 다른 글
| 컴퓨터 비전 - 11. SURF (0) | 2020.07.28 |
|---|---|
| 컴퓨터 비전 - 10. SIFT (0) | 2020.07.28 |
| 컴퓨터비전 - 8. 에지로부터 선분 검출 (0) | 2020.07.28 |
| 컴퓨터 비전 - 7. 에지들 (0) | 2020.07.28 |
| 컴퓨터 비전 - 6. 연결요소와 범람채움, 모폴로지 (0) | 2020.07.27 |