728x90
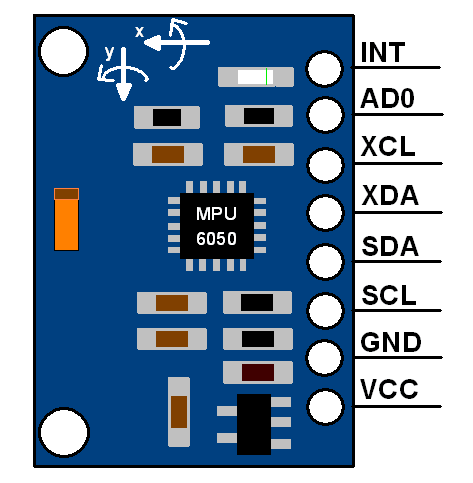
gyro xyz : 각 축 방향에 대한 각 변화량
acc xyz : 각 축 방향의 가속도
mpu 6050의 각 축에 대해서 잘 나온 그림이 있어 가져왔다.

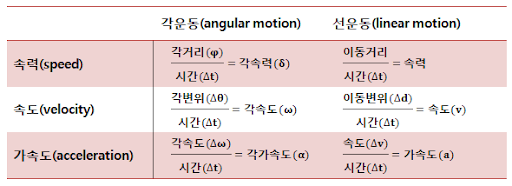
평행이동과 회전 운동의 관계
1. 센서를 가만히 나둔 경우
기본적으로 gyro xyz는 각 변화량으로 축 방향으로 변화가 있을때만 값의 변화가 크게 일어난다.
-> 가만히 있으면 g xyz는 큰 변화는 없음
acc xyz는 각 축 방향에 대한 가속도를 출력하고 있으나 센서가 움직이지 않는 상태에서는 중력가속도의 영향으로
-> acc z축값만 크고 다른 값들은 크게 변하지 않는다.
=> 센서에 동작이 없으므로 ax, ay/ gxyz는 큰 변화없이 az만 15000정도로 유지

2. 회전 시킨 경우
2.1 gyro
회전하는 순간의 각 속도가 gx, gy, gz로 출력
-> 회전하는 동안만 속도가 0이 아니나 회전을 멈춘 순간 원상태로 돌아옴
2.2 acc
가속도계는 중력 가속도의 영향으로 x/y축 방향으로 양방향 음방향 회전에 따라 값이 유지

3. 선운동의 경우
3.1 x, y 선운동

3.2 z축 선운동
15000 정도 되던 acc z값이
내려가는 순간 -32768 까지 떨어짐
이후 돌아옴


300x250
'로봇 > 전기전자&메카' 카테고리의 다른 글
| 프로토타이핑 - 34. 밸런싱 로봇 예제 살펴보기 (0) | 2020.08.30 |
|---|---|
| 프로토타이핑 - 33. 상보필터, 오일러각 (0) | 2020.08.30 |
| 프로토타이핑 - 31. 라즈베리파이3 opencv 설치 및 영상 스트리밍 (0) | 2020.08.30 |
| 프로토타이핑 - 30. 파이에서 아두이노의 MPU6050 값 읽기 (0) | 2020.08.29 |
| 프로토타이핑 - 29. 아두이노와 라즈베리파이 양방향 통신 (0) | 2020.08.29 |