728x90
ORB
- FAST + Rotated BRIEF
- 고속 특징 검출이 가능하며 회전 변화에 강인
import numpy as np
import cv2
cap = cv2.VideoCapture(0)
ret, frame = cap.read()
rsz = cv2.resize(frame, dsize=(320,240))
gray = cv2.cvtColor(rsz, cv2.COLOR_BGR2GRAY)
# Initiate ORB detector
orb = cv2.ORB_create()
# find the keypoints with ORB
kp = orb.detect(gray,None)
# compute the descriptors with ORB
kp, desc = orb.compute(gray, kp)
#print("orb kp.shape : " + str(len(kp)) + ", orb desc.shape : " + str(desc.shape))
while(True):
ret, frame = cap.read()
frame = cv2.flip(frame, 0)
rsz = cv2.resize(frame,dsize=(320,240))
gray = cv2.cvtColor(rsz, cv2.COLOR_BGR2GRAY)
# find the keypoints with ORB
kp = orb.detect(gray,None)
# compute the descriptors with ORB
kp, desc = orb.compute(gray, kp)
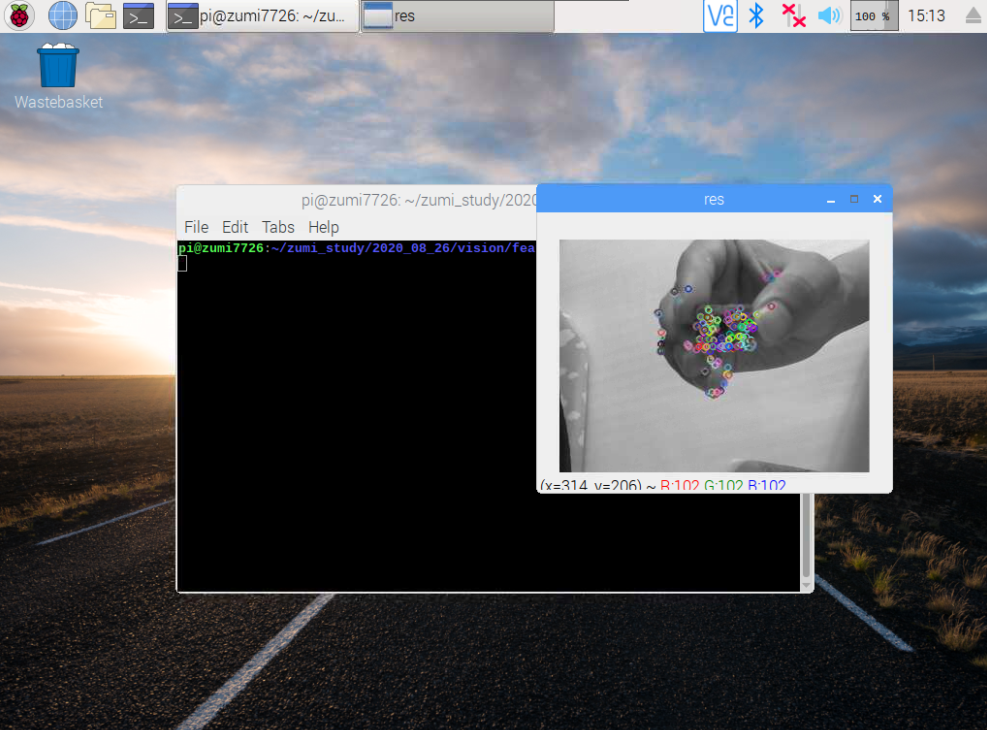
# draw only keypoints location,not size and orientation
res = cv2.drawKeypoints(gray,kp,None)
cv2.imshow('res',res)
if cv2.waitKey(20) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
300x250
'로봇 > 로봇' 카테고리의 다른 글
| zumi - 26. pi에서 빌드없이 opencv 설치하기 (0) | 2020.08.28 |
|---|---|
| zumi - 25. mpu6050 가속도계로 속도, 위치 구하기 fail (0) | 2020.08.28 |
| zumi - 23. FAST (0) | 2020.08.25 |
| zumi - 22. 저주파 통과 필터 (0) | 2020.08.25 |
| zumi - 21. 평균 필터 (0) | 2020.08.25 |