728x90
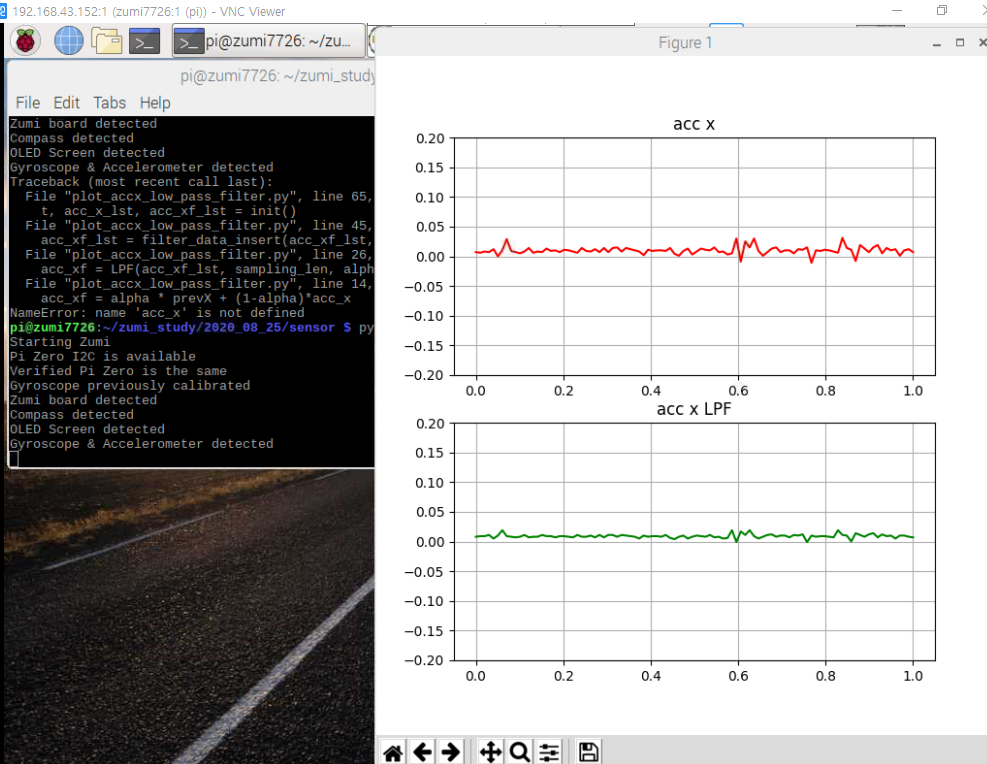
간단한 1차 저주파 통과 필터
ref : https://gaussian37.github.io/autodrive-ose-low-pass-filter/
저주파 통과 필터 : 잡음 제거 + 변화 민감
from zumi.zumi import Zumi
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
import time
data_len = 100
sampling_len = 10
alpha = 0.5
def LPF(acc_xf_lst, sampling_len, alpha, acc_x):
prevX = acc_xf_lst[len(acc_xf_lst)-sampling_len:len(acc_xf_lst)-1].sum()/sampling_len
acc_xf = alpha * prevX + (1-alpha)*acc_x
acc_xf = round(acc_xf, 3)
return acc_xf
def data_insert(acc_x_lst, acc_x):
acc_x_lst = np.append(acc_x_lst, acc_x)
acc_x_lst = np.delete(acc_x_lst, 0)
return acc_x_lst
def filter_data_insert(acc_xf_lst, alpha, acc_x):
acc_xf_lst = np.delete(acc_xf_lst, 0)
acc_xf = LPF(acc_xf_lst, sampling_len, alpha, acc_x)
acc_xf_lst = np.append(acc_xf_lst, acc_xf)
return acc_xf_lst
def init():
idx = 0
acc_x_lst = np.zeros(data_len)
acc_xf_lst = np.zeros(data_len)
t = np.linspace(0, 1, data_len)
while idx < data_len:
acc = zumi.get_acc()
acc_x = round(acc[0], 3)
acc_x_lst = data_insert(acc_x_lst, acc_x)
acc_xf_lst = filter_data_insert(acc_xf_lst, alpha, acc_x)
idx = idx + 1
return t, acc_x_lst, acc_xf_lst
def update(i):
global acc_x_lst, acc_xf_lst
acc = zumi.get_acc()
acc_x = round(acc[0], 3)
acc_x_lst = data_insert(acc_x_lst, acc_x)
acc_xf_lst = filter_data_insert(acc_xf_lst, alpha, acc_x)
ln0.set_data(t, acc_x_lst)
ln1.set_data(t, acc_xf_lst)
return ln0, ln1
zumi = Zumi()
t, acc_x_lst, acc_xf_lst = init()
fig, ax = plt.subplots(2,1)
ln0, = ax[0].plot(t,acc_x_lst, 'r')
ax[0].grid(True)
ax[0].set_title("acc x")
ax[0].set_ylim((-0.2,0.2))
ln1, = ax[1].plot(t,acc_xf_lst, 'g')
ax[1].grid(True)
ax[1].set_title("acc x LPF")
ax[1].set_ylim((-0.2,0.2))
ani = FuncAnimation(fig, update, frames=t, blit=True)
plt.show()
300x250
'로봇 > 로봇' 카테고리의 다른 글
| zumi - 24. ORB (0) | 2020.08.27 |
|---|---|
| zumi - 23. FAST (0) | 2020.08.25 |
| zumi - 21. 평균 필터 (0) | 2020.08.25 |
| zumi - 20. 실시간 mpu 플로팅 (0) | 2020.08.25 |
| zumi - 19. 주미 에지 영상 (0) | 2020.08.25 |