728x90
컴퓨터 비전에서의 매칭
- 서로 다른 영상간의 특징점 쌍이 동일한 것인지 확인하는 과정
- 유사성 or 거리를 측정하여 확인
=> 특징점 쌍 매칭에 거리 + 유사도 측정 척도가 필요
매칭에 사용하는 특징
- 에지
- 지역 특징
- 영역
SIFT 기술자의 거리재기
- SIFT 기술자는 128차원
- 두 점 a, b가 주어질때 이들의 거리를 측정해야함
- 방법 : 유클리디안 거리, 마할라 노비스 거리
유클리디안 거리
- 두 점 a, b가 주어질때, a와 b의 차로 구한 내적
- 유클리디안 거리가 작다 => 같은 지점을 나타낸다.

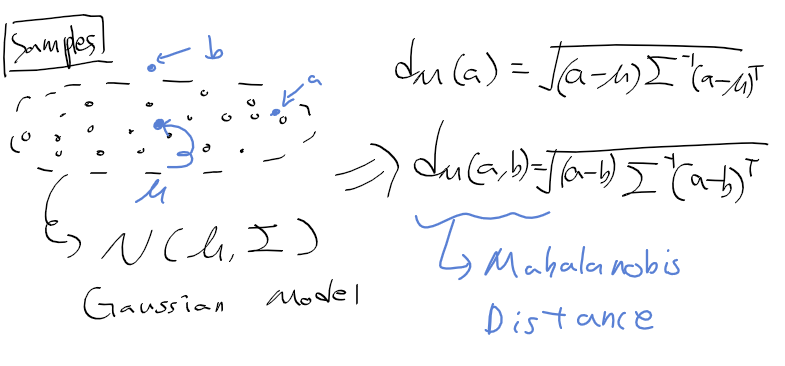
마할라노비스 거리
- 분산을 고려한 거리
- 아래의 경우 평균 mu와 점 b, 점 c가 주어질때 유클리드 거리상 점 b가 가까우나 이는 노이즈
- 점 c가 점 b보다 mu에 가깝다고 봐야함
=> 마할라노비스 거리 : 공분산을 고려한 거리
300x250
'로봇 > 영상' 카테고리의 다른 글
| 컴퓨터 비전 - 24. kd 트리를 이용한 매칭 (0) | 2020.07.31 |
|---|---|
| 컴퓨터 비전 - 23. ROC 곡선과 매칭 전략 (0) | 2020.07.31 |
| 컴퓨터 비전 - 21. 얼굴 인식 (0) | 2020.07.31 |
| 컴퓨터 비전 - 20. 주성분 분석 PCA (0) | 2020.07.30 |
| 컴퓨터 비전 - 19. 질감, 텍스처 (0) | 2020.07.30 |