이미지 획득에서 카메라와 눈 비교
| 카메라 | 눈 |
| 렌즈 | 수정체 |
| CCD 센서 | 망막 |
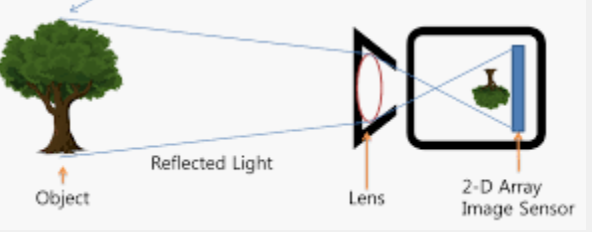
핀홀 카메라 모델
- 카메라가 영상을 얻는 원리를 간단하게 나타낸 수학적 모델
- 빛이 핀홀 카메라의 작은 구멍으로 들어가 이미지 평면, CCD 상에 맺힘
=> 빛 통과 -> 샘플링 -> 양자화 -> 디지털 영상
영상의 표현
- 2차원 행렬로 표현 -> f(x, y)
- 픽셀 : 영상의 한 점
- 해상도 : 영상의 크기
- 흑백 영상 : 명암만으로 표현하는 영상(0 ~ 255)
- 컬러 영상 : R채널, G 채널, B채널을 동시에 나타내는 영상
히스토그램
- 각 명암 값들의 빈도수를 정리한 그래프
- 히스토그램이 좌측(0)에 치우쳐지면 어둡고, 우측(255)에 치우쳐지면 밝은 영상

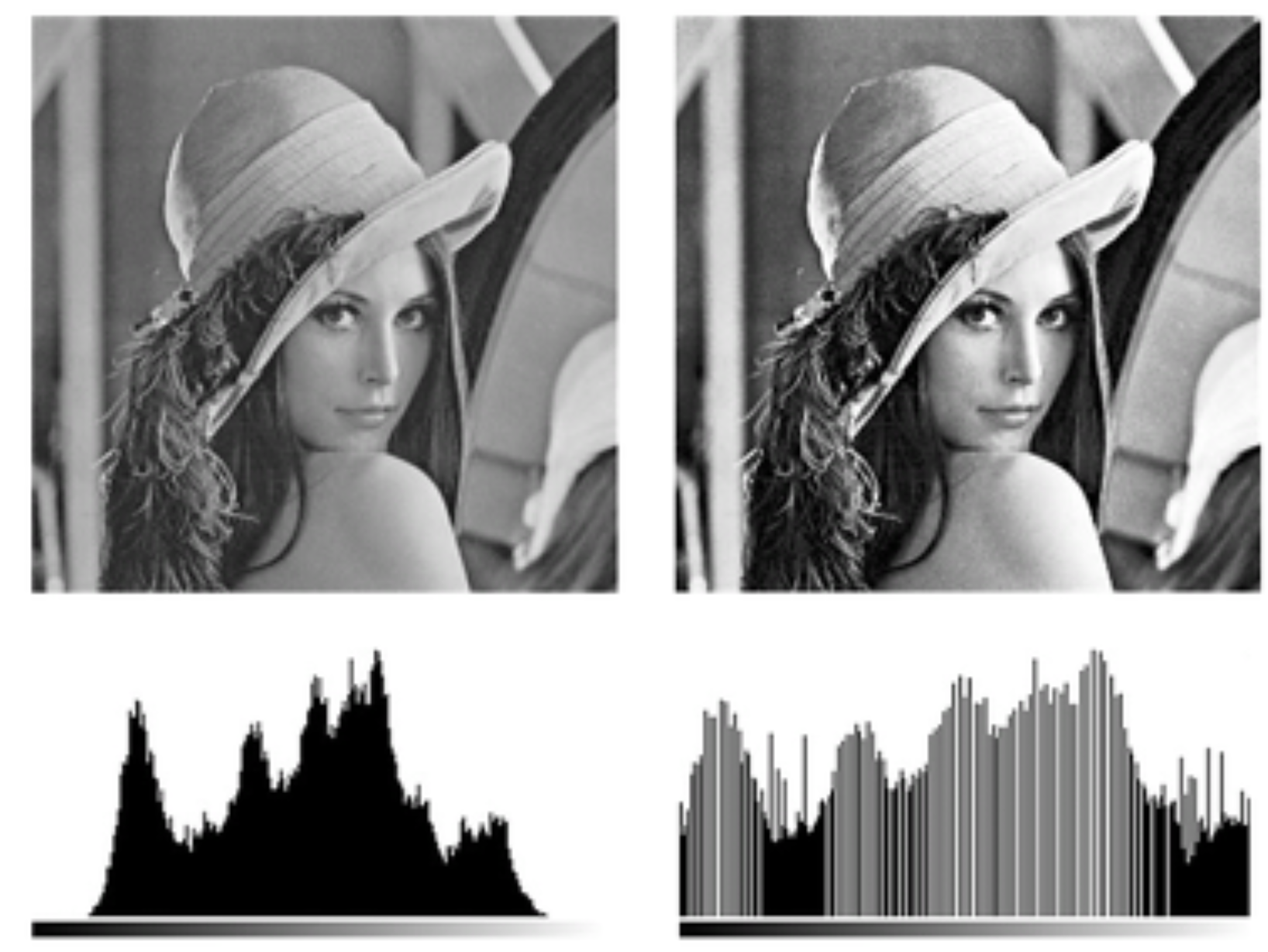
히스토그램 평활화 histogram equalization
- 한쪽으로 치중된 명암을 균일하게 해주는 연산
- 좌측 영상이 원본, 우측 영상이 히스토그램 평활화 수행 후 영상
히스토그램 역투영 histogram backprojection
- 특정 색상 분포 만으로 물체를 검출하는 방법 -> 명암이 아니라 색상 공간을 사용
- 히스토그램 역투영을 이용한 얼굴 검출
1. 얼굴 모델의 색상에 큰 가중치를 주고, 나머지 영역들은 낮춤
2. 얼굴 모델과 비슷한 영역들만 밝고 나머지는 어두워짐


'로봇 > 영상' 카테고리의 다른 글
| 컴퓨터 비전 - 6. 연결요소와 범람채움, 모폴로지 (0) | 2020.07.27 |
|---|---|
| 컴퓨터 비전 - 5. 영역 연산과 기하학적 연산 (0) | 2020.07.27 |
| 컴퓨터 비전 - 4. 이미지 프로세스와 점 연산 (0) | 2020.07.27 |
| 컴퓨터 비전 - 3. 이진영상 (0) | 2020.07.27 |
| 컴퓨터 비전 - 1. 개요 (0) | 2020.07.27 |