LED PCB 보더 거버 생성
- 거버 파일 : 기반 자동화 제작에 필요한 정보들을 가짐
ex. 구멍 위치, 크기, 선 두께, 부품 간격 등
- gerb274x.cam과 excellon.cam파일로 출력
- 생성된 거버 파일은 PCB 각 계층에 대한 이미지 정보를 가짐
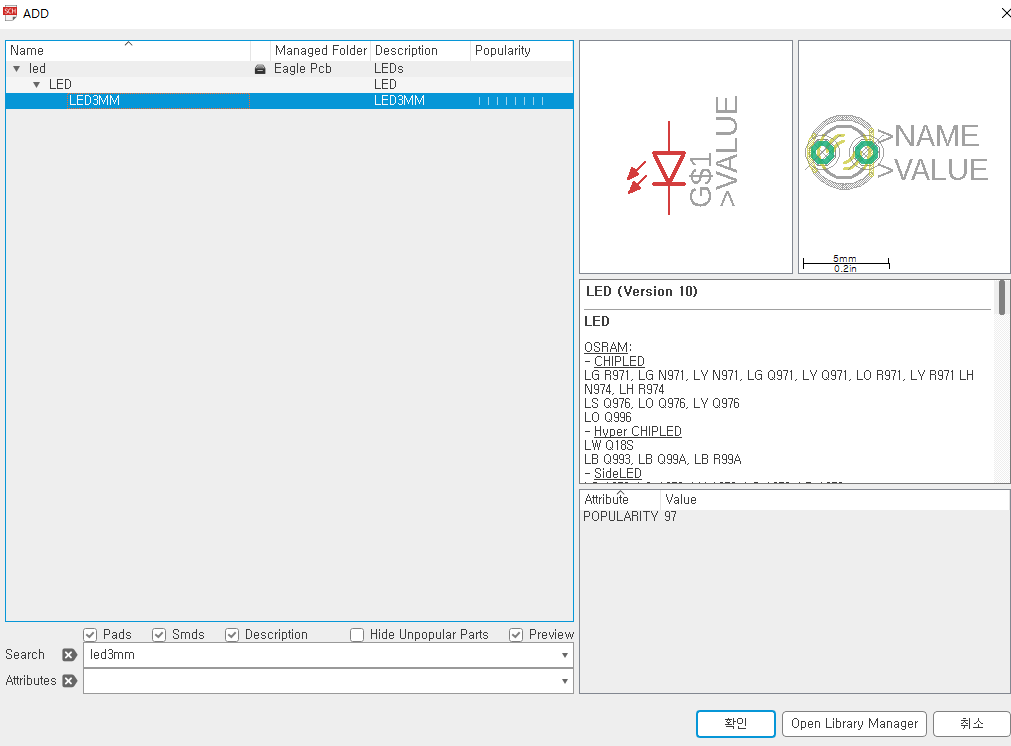
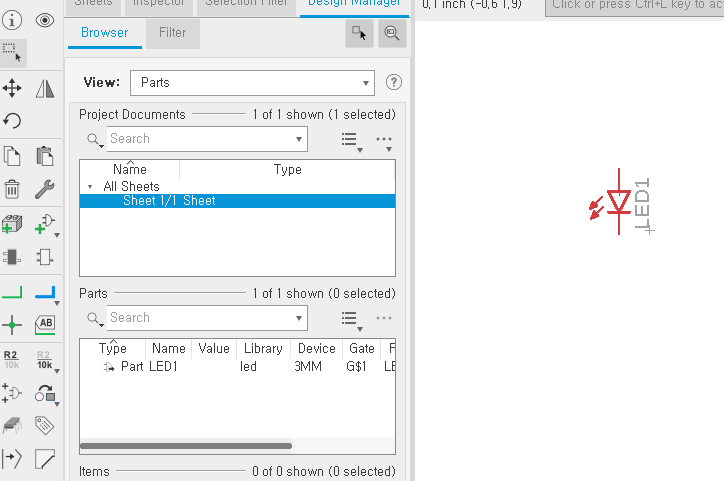
- LED 추가
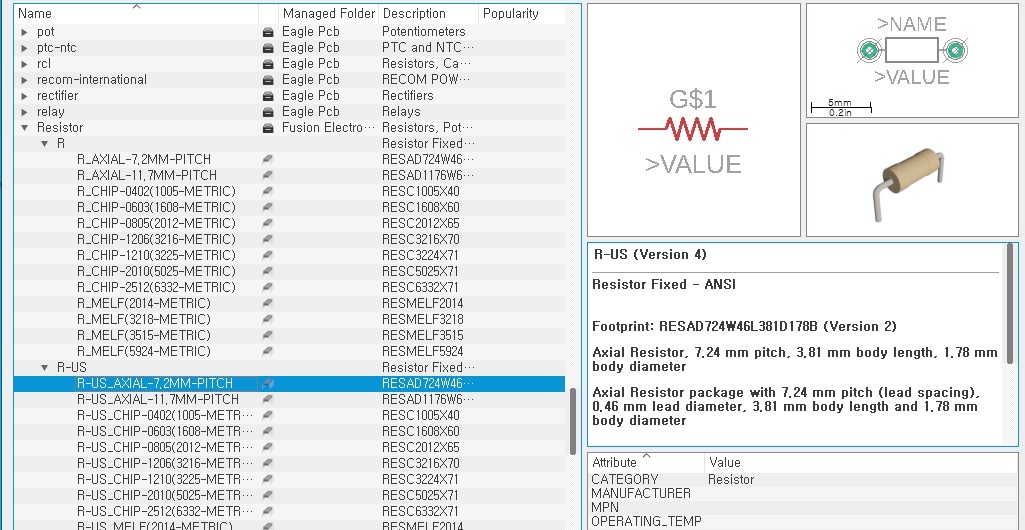
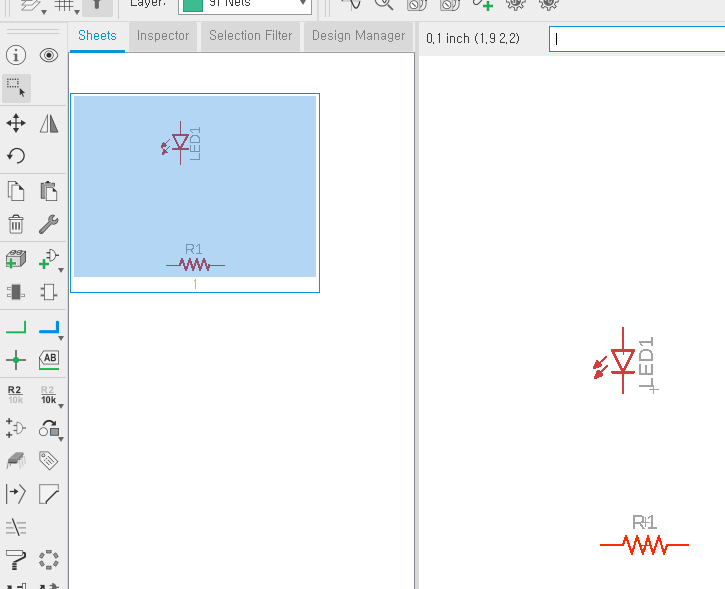
- 저항 추가
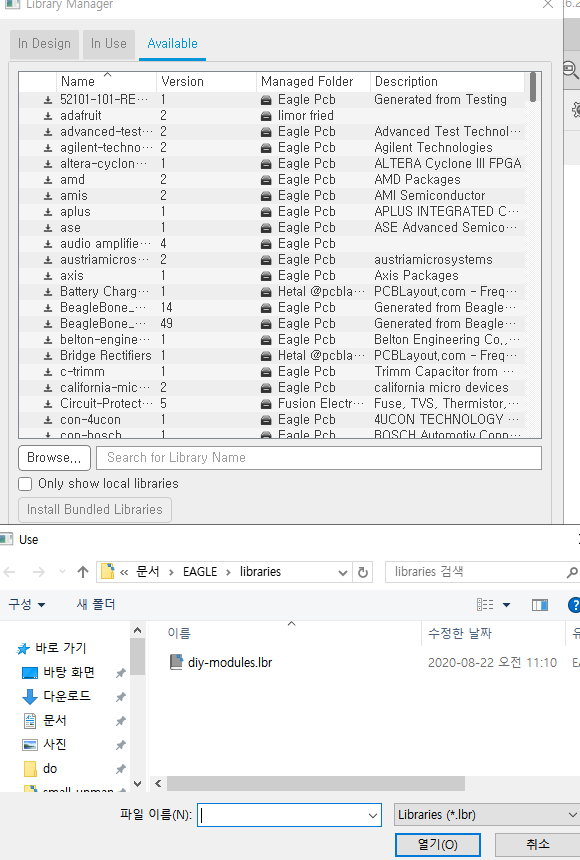
- 배터리 홀더 추가하기전에 라이브러리 추가
-> 라이브러리 매니저의 available에서 browse 버튼을 누르면 아까 추가한 라이브러리 파일을 찾을수 있음
-> diy-modules.lbr 추가
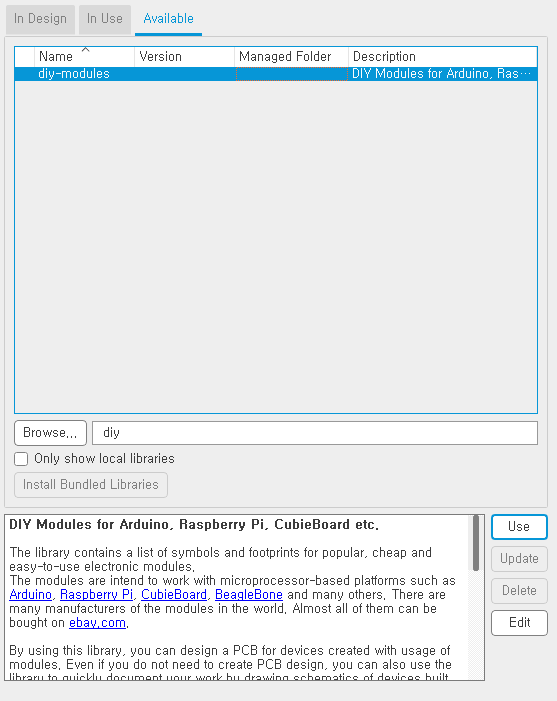
- diymodules 사용하기
-> use를 눌러주면 이제 battery holder 파츠를 사용 가능
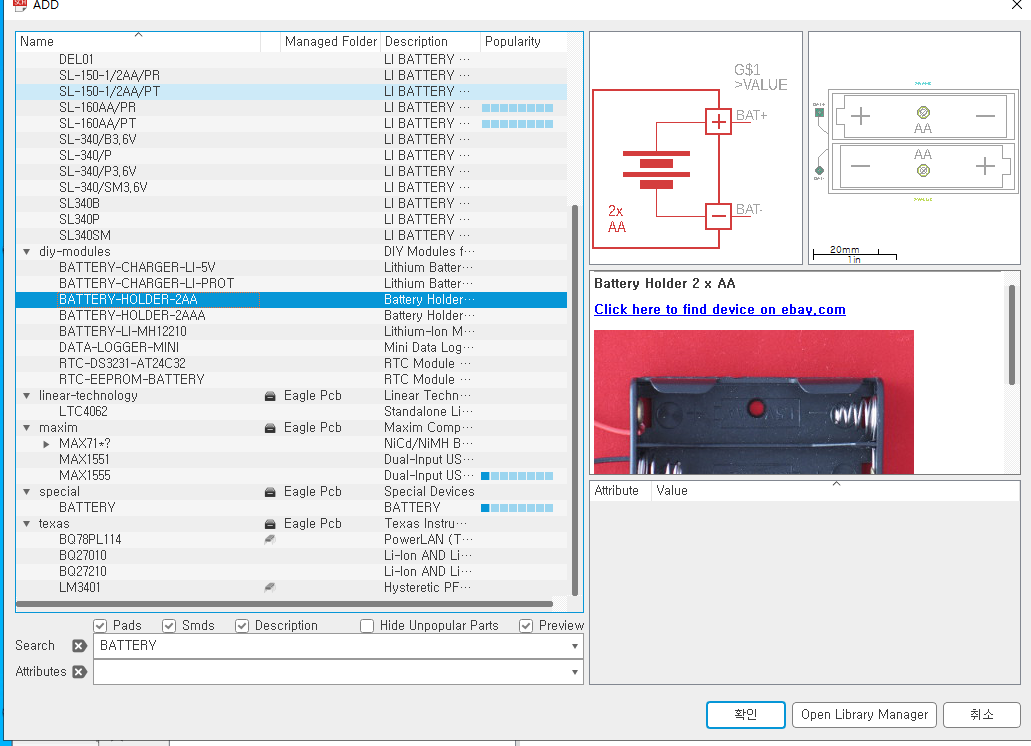
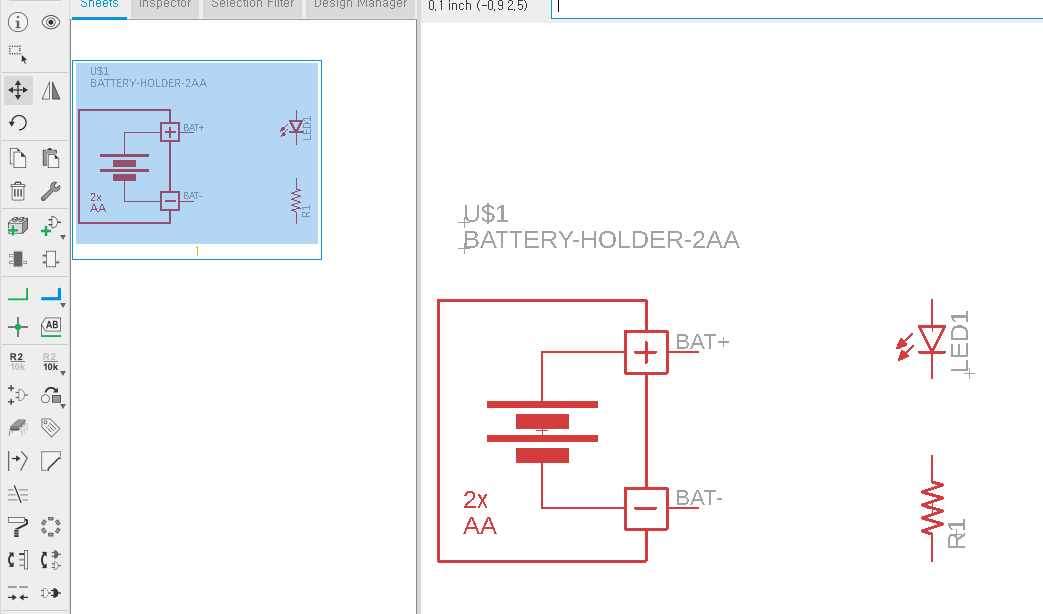
- 배터리 홀더 검색
대소문자 구분해서 검색하면 방금 추가한 diy-modules에서 2x AA 베터리 홀더 추가 가능
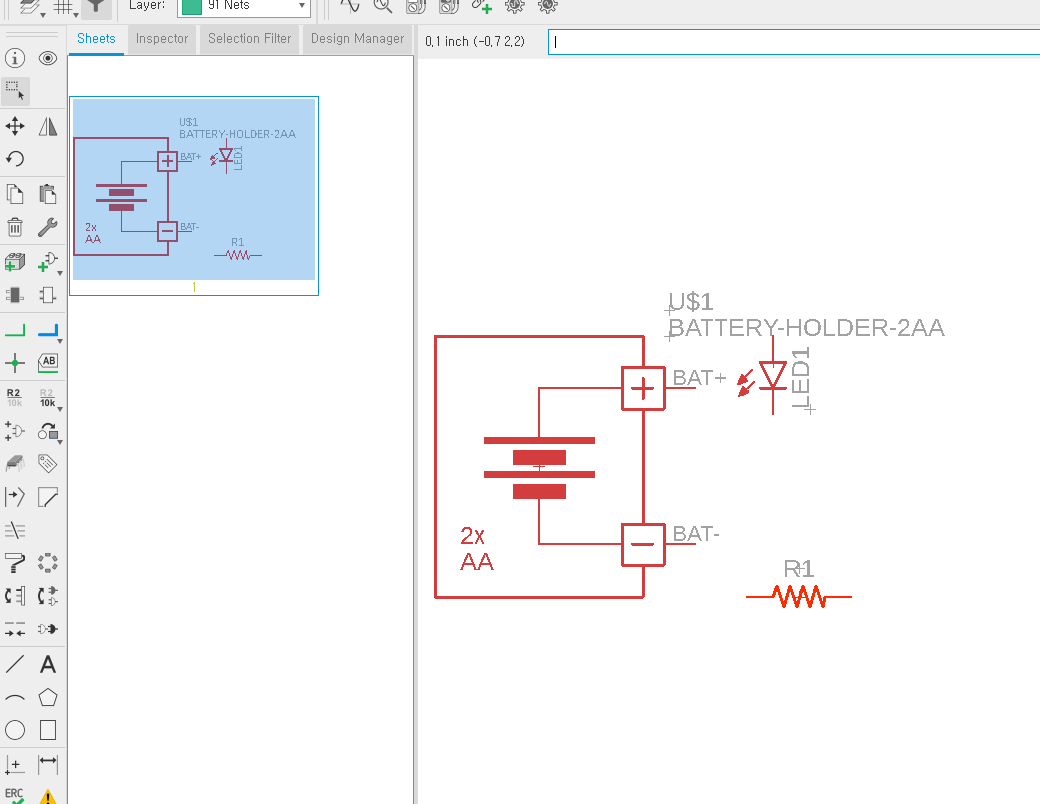
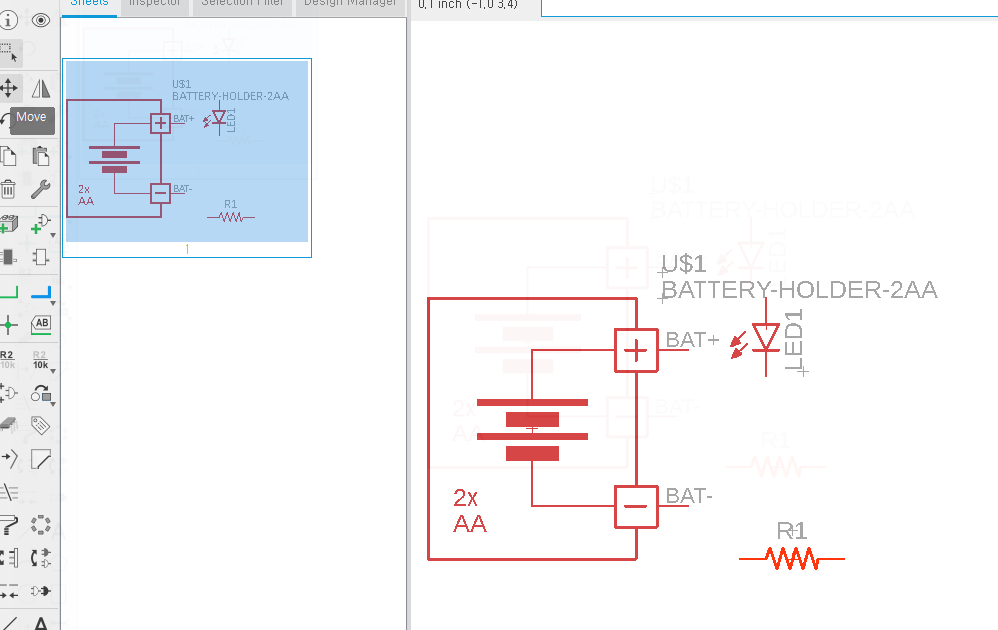
- move로 파츠 옮기기
-> 오른쪽 마우스 클릭하면 방향 조정가능
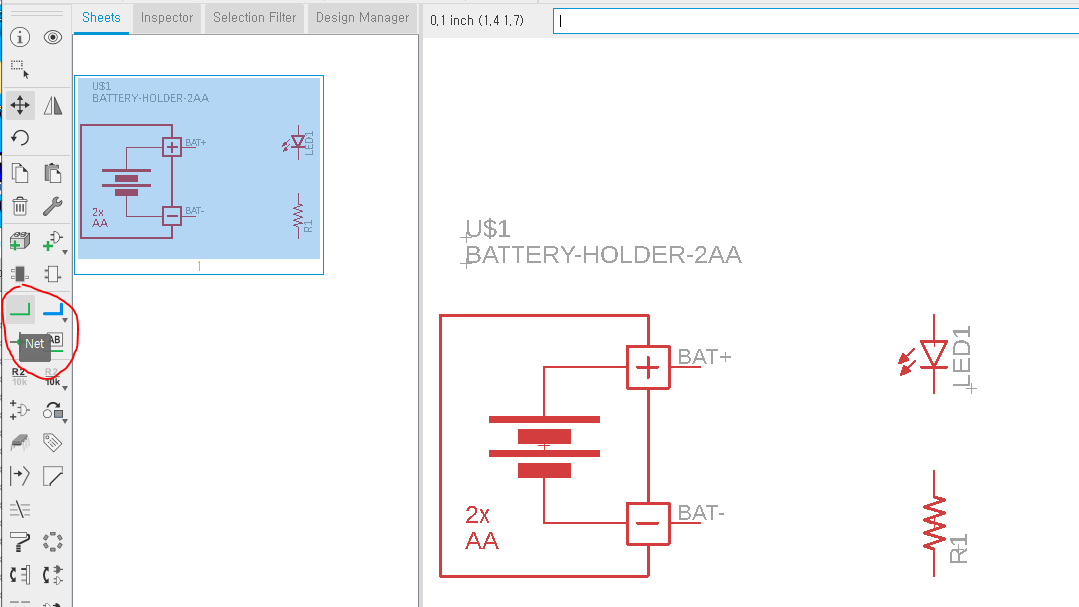
- 배선하기
-> Net을 사용해서 연결
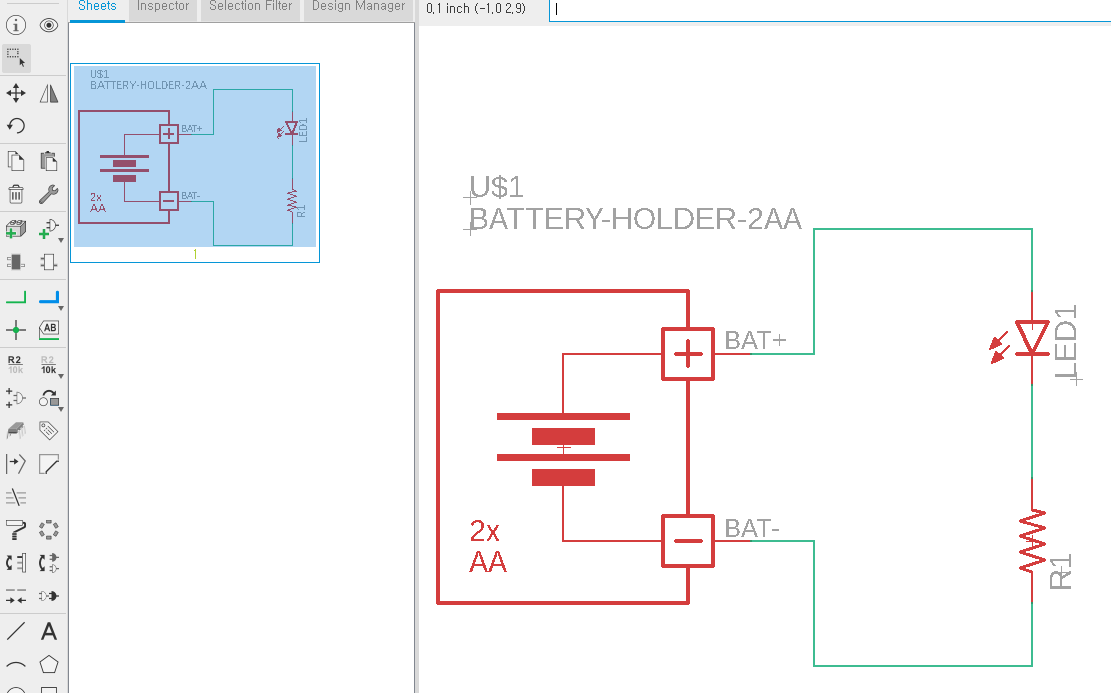
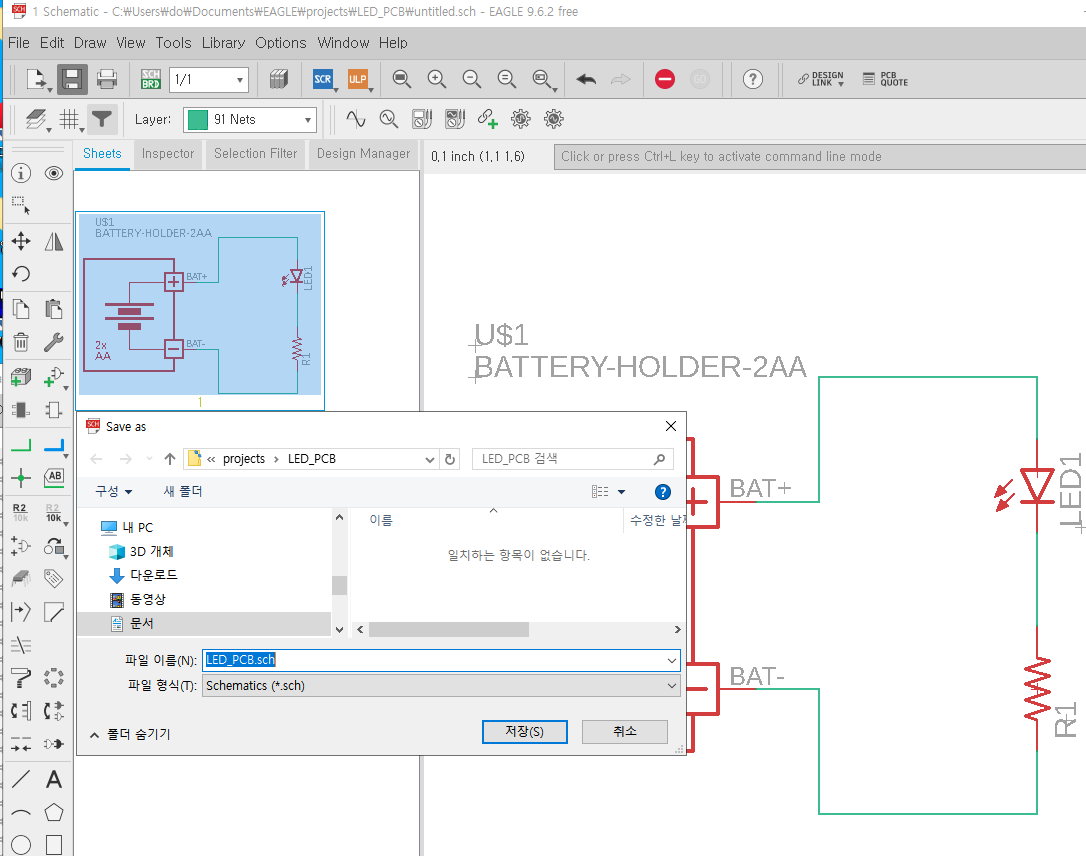
- 저장하기
LED PCB가 완성되었으니 스케메틱파일 저장
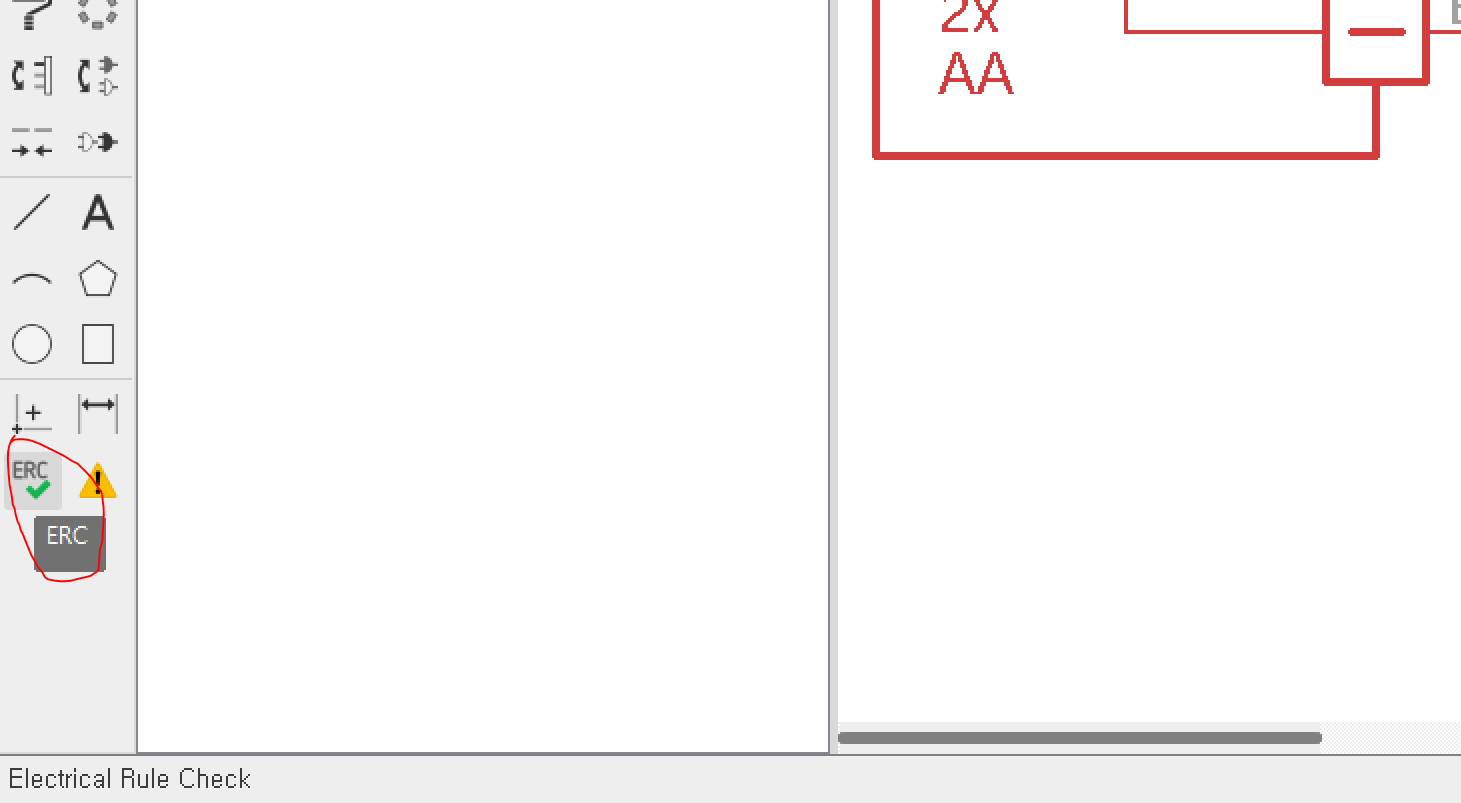
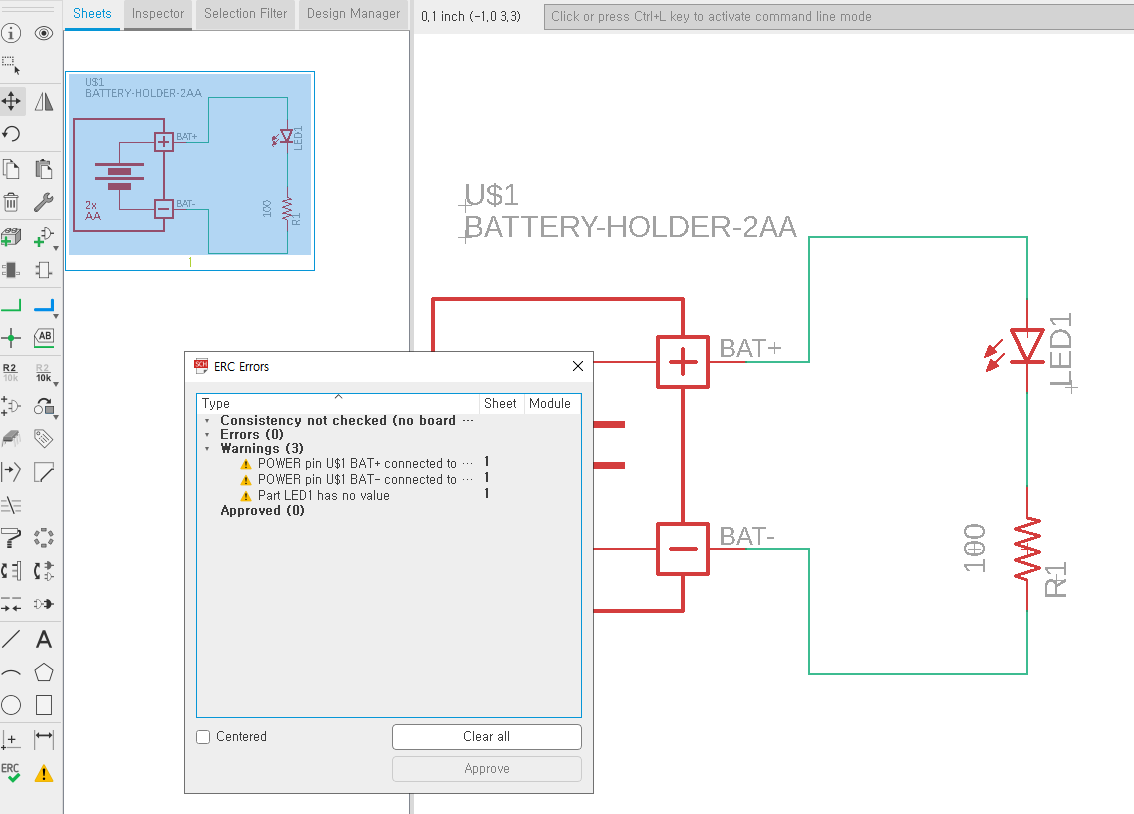
- 회로 연결 확인
-> ERC 클릭
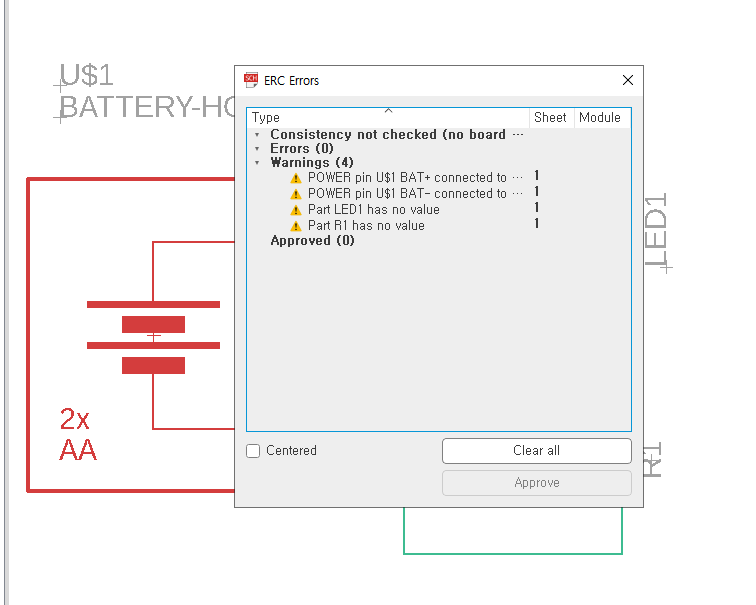
=> 에러는 없지만 워닝 발생
-> LED1과 R1에 값이 지정이 안됨
- 저항값 지정하기
-> 좌측의 LED 클릭
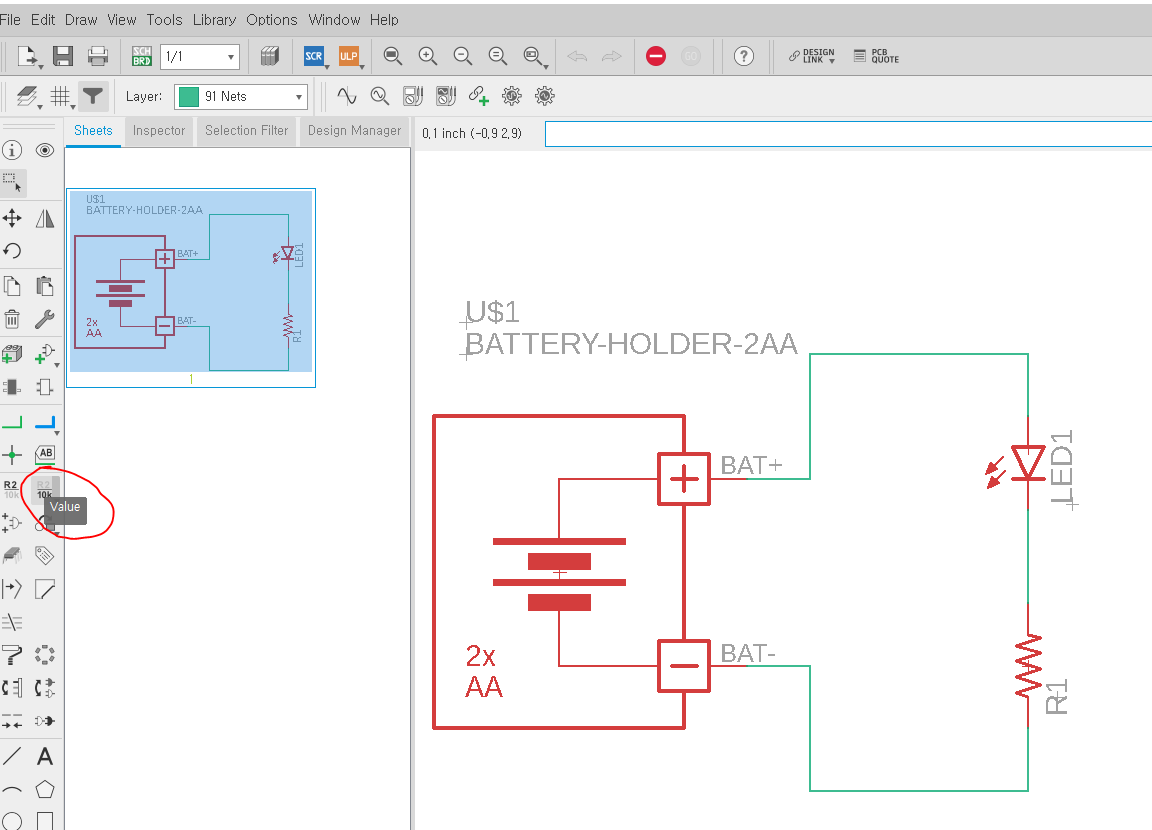
-> R1 클릭
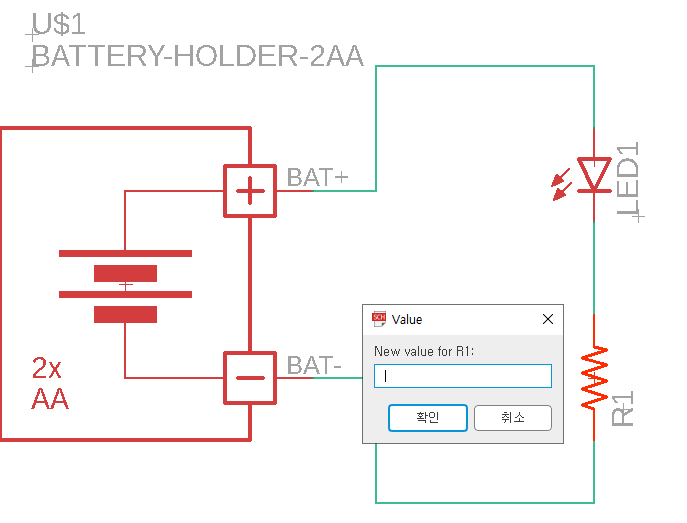
-> 100을 준결과
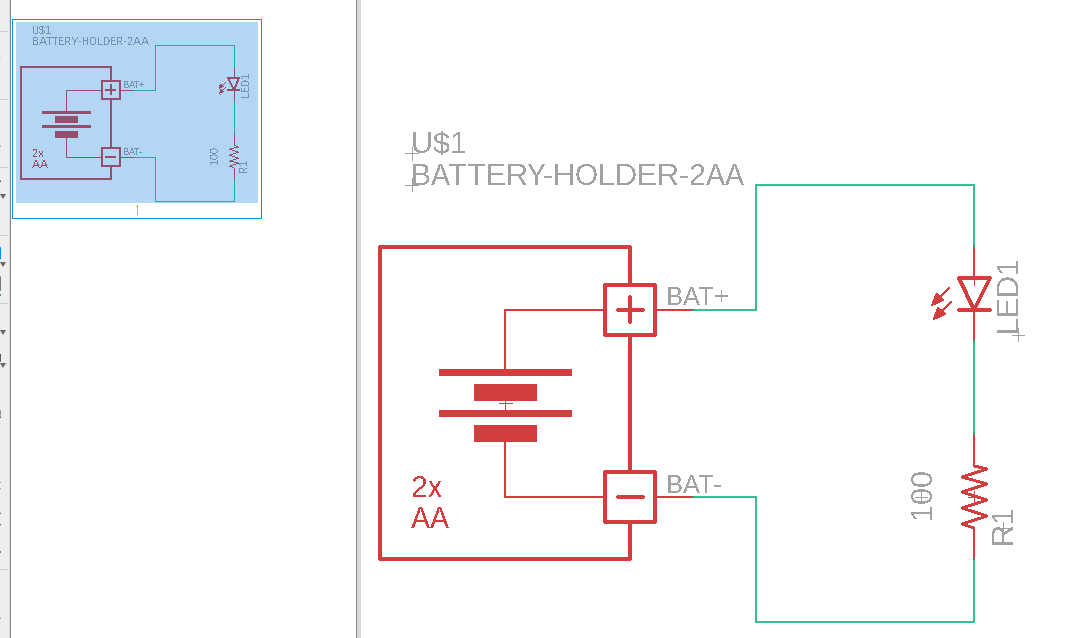
-> ERC를 다시해보면 R1 워닝이 사라짐
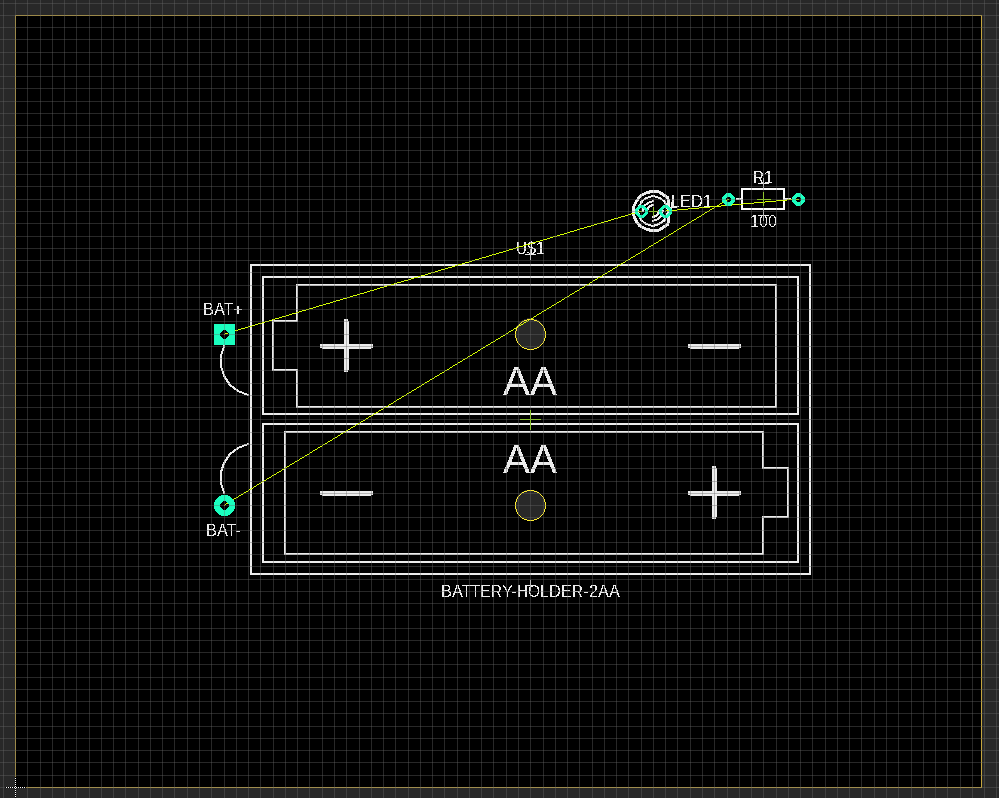
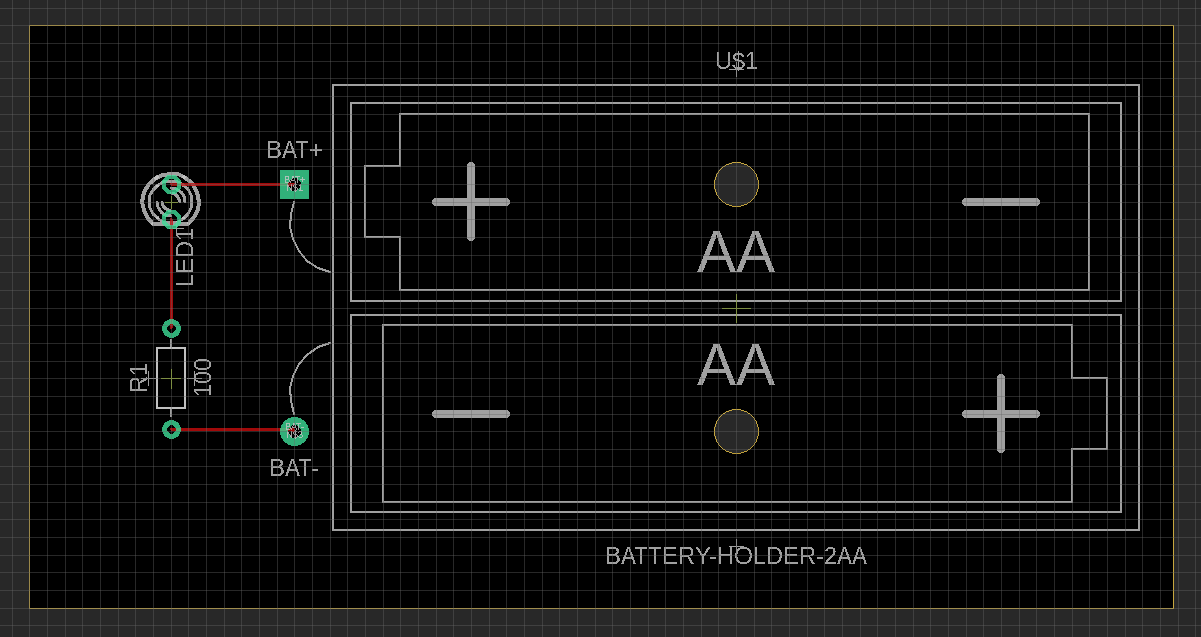
- 보드 만들기
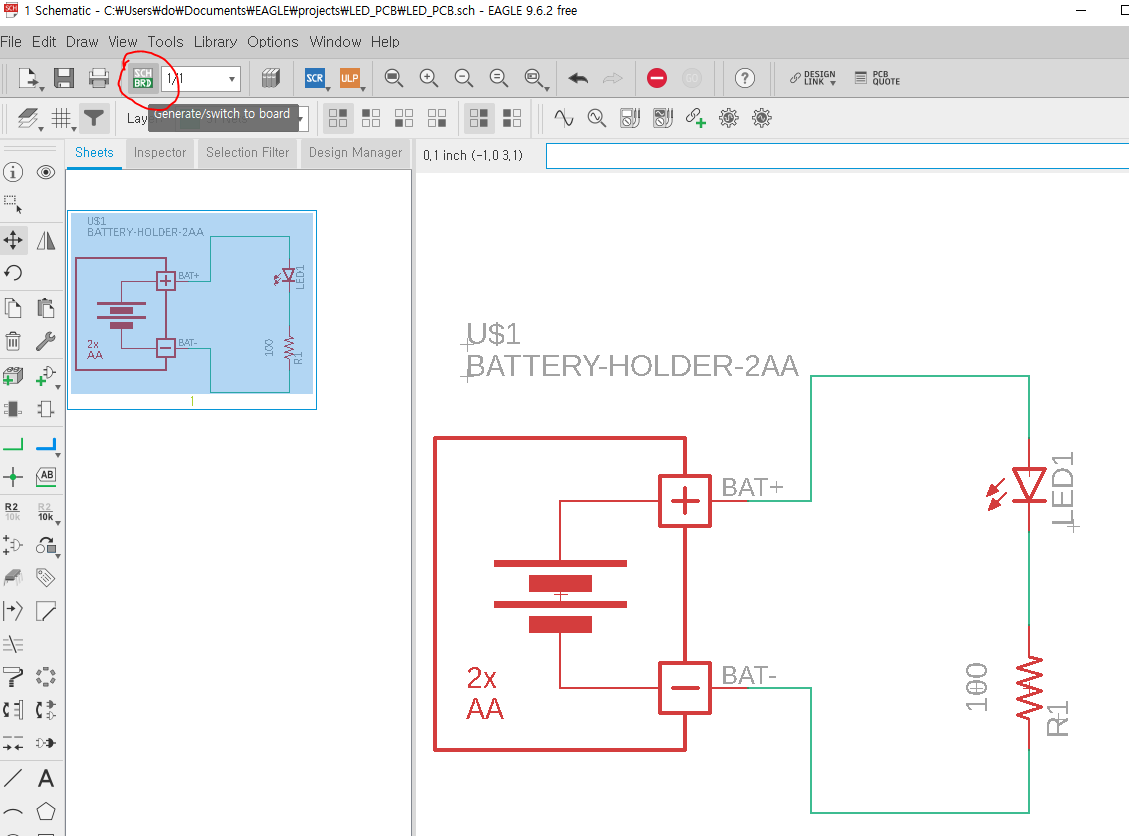
- 보드 아트웍 할수 있는 보드창이 켜짐
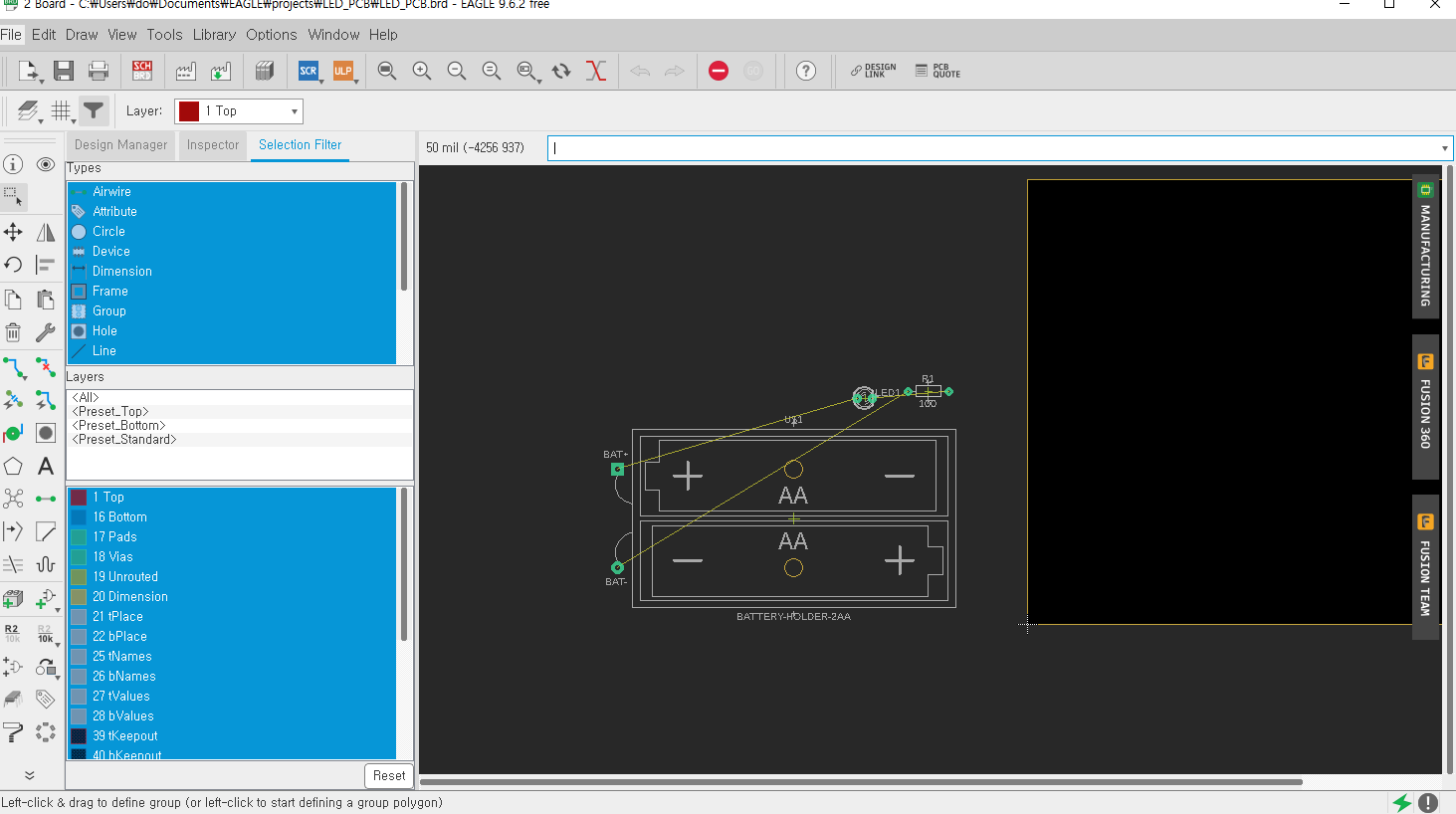
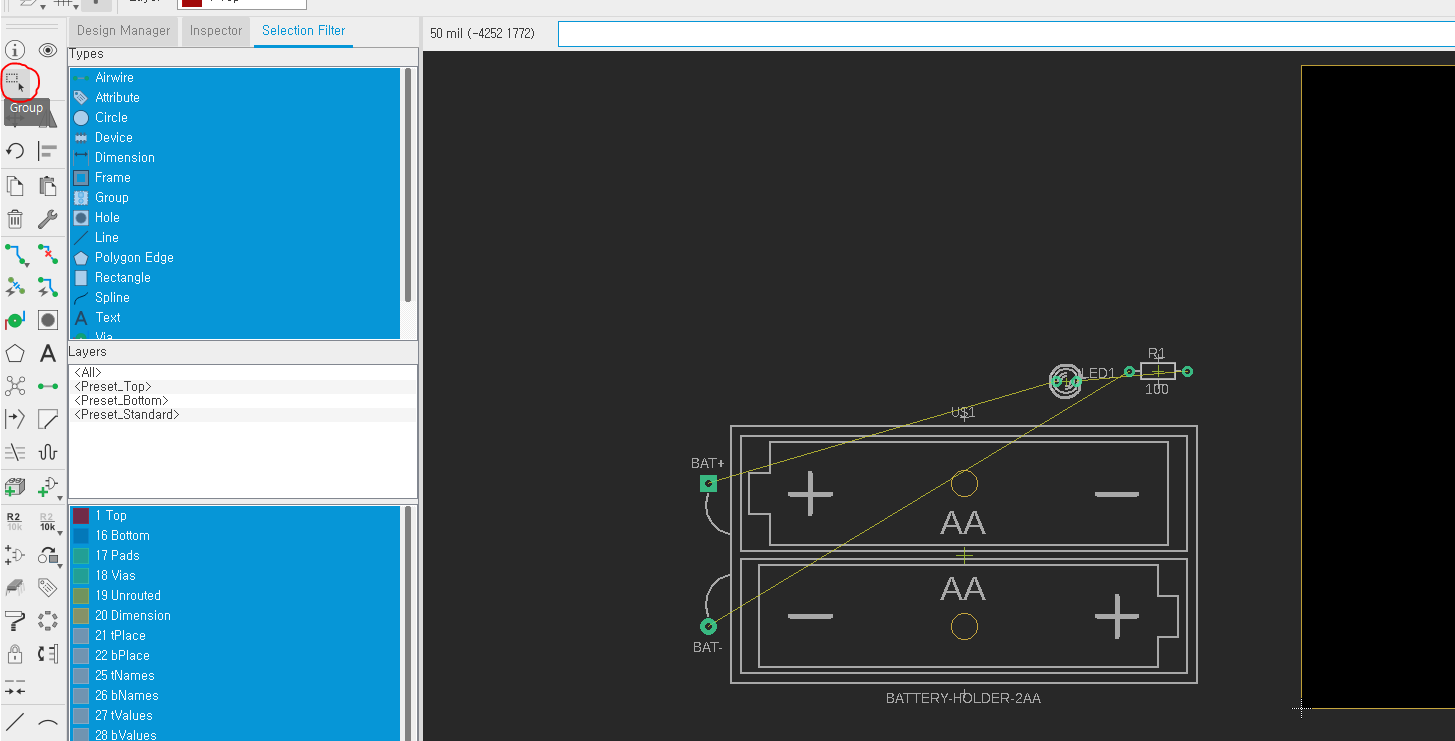
- 그룹 버튼으로 모든 파츠들을 선택 후 이동시키자
- 바깥의 노란선은 PCB의 외곽선
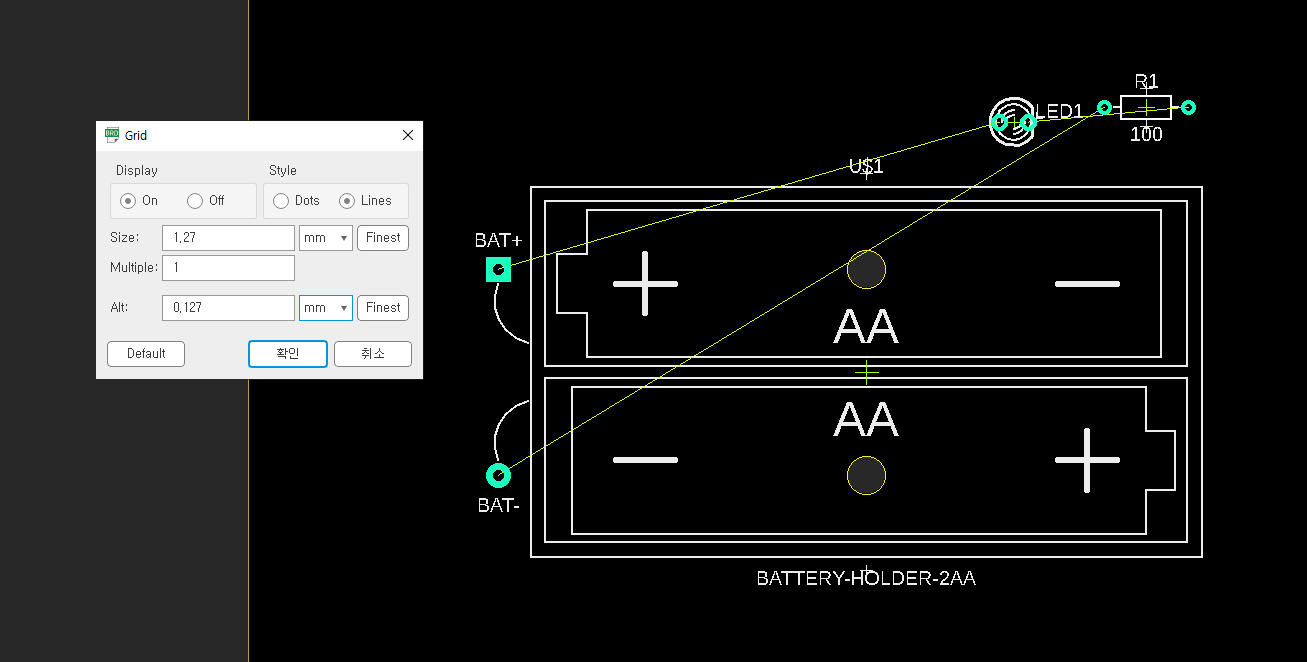
- 그리드 켜기
-> 좌측 상단의 그리드 버튼 클릭
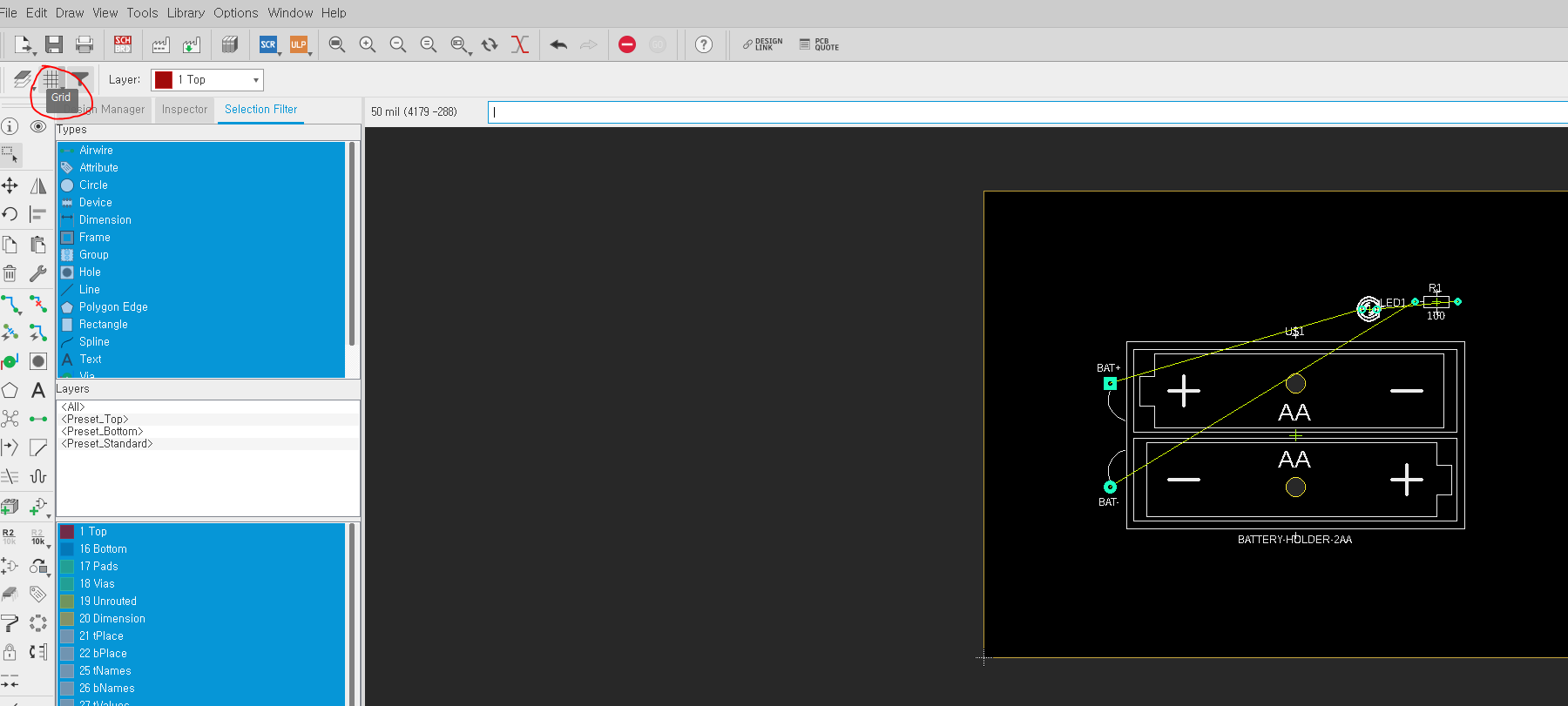
-> 그리드 디스플레이 온 해주고, 단위는 mm로 변경
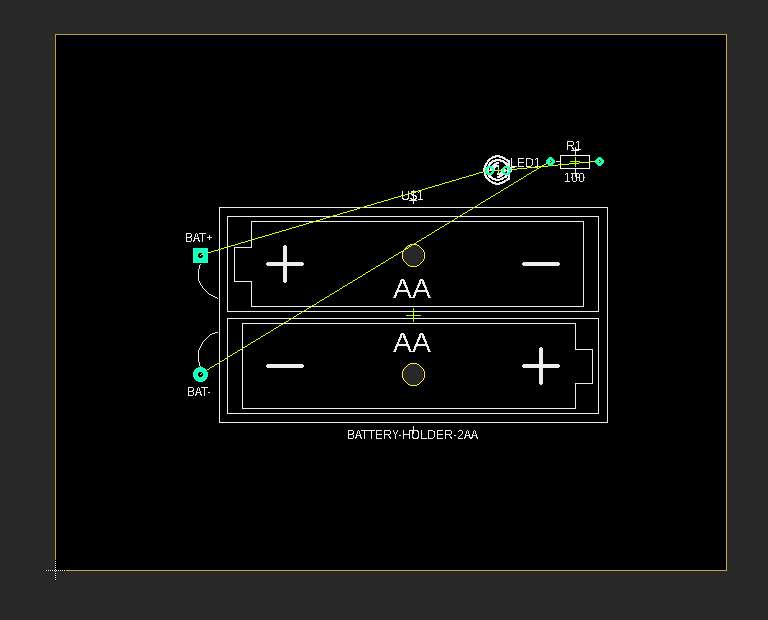
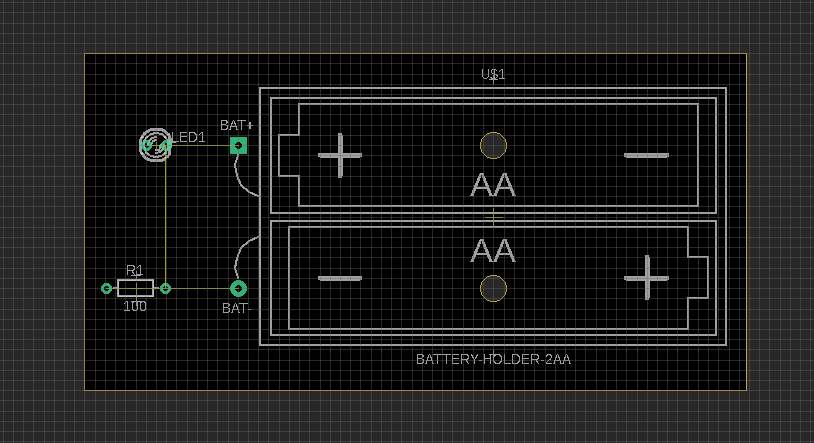
- 배치 정리 후 아웃라인도 줄여주자
-> MOVE로 파츠와 아웃라인 선을 옮길수 있음
- 배선하기
-> 우선 약간 꼬여있으니 LED와 저항을 회전시켜 정리해주자
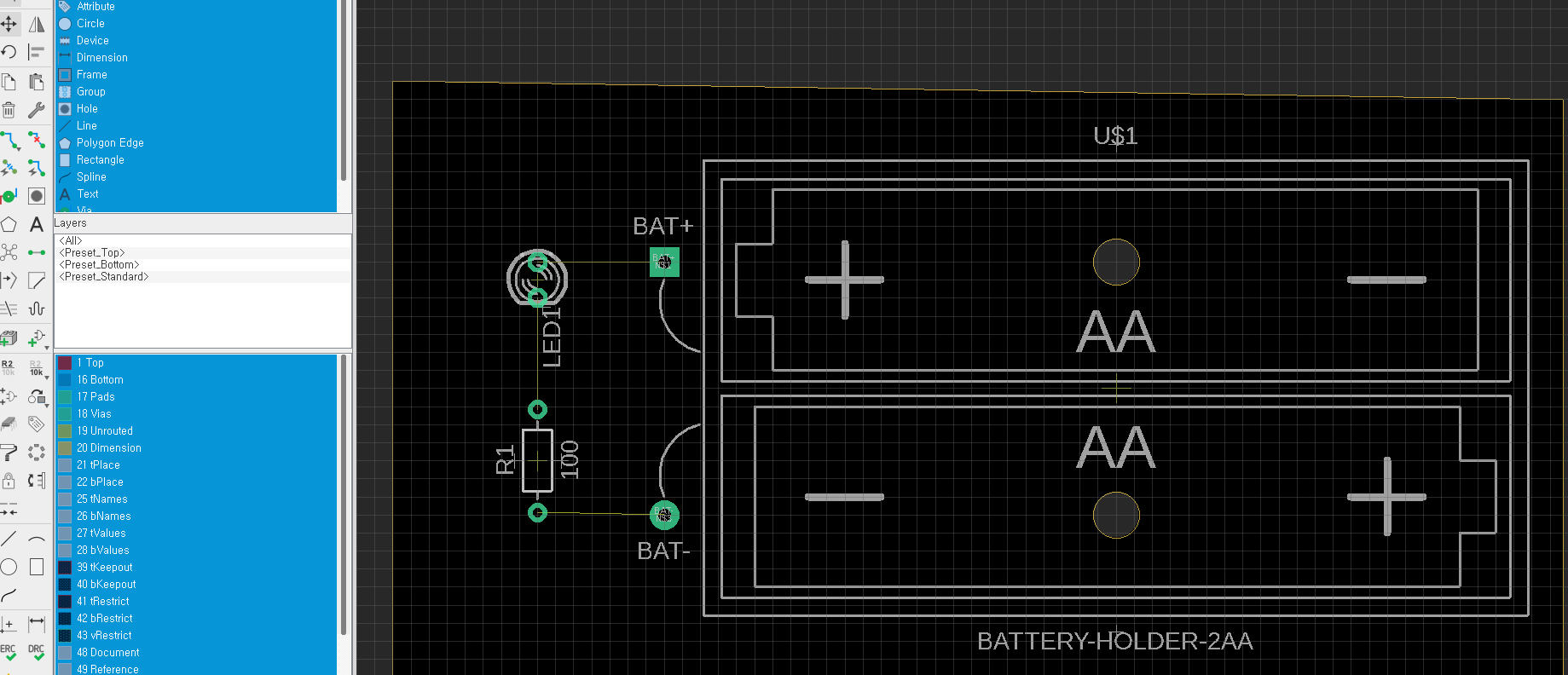
-> Route로 배선하기
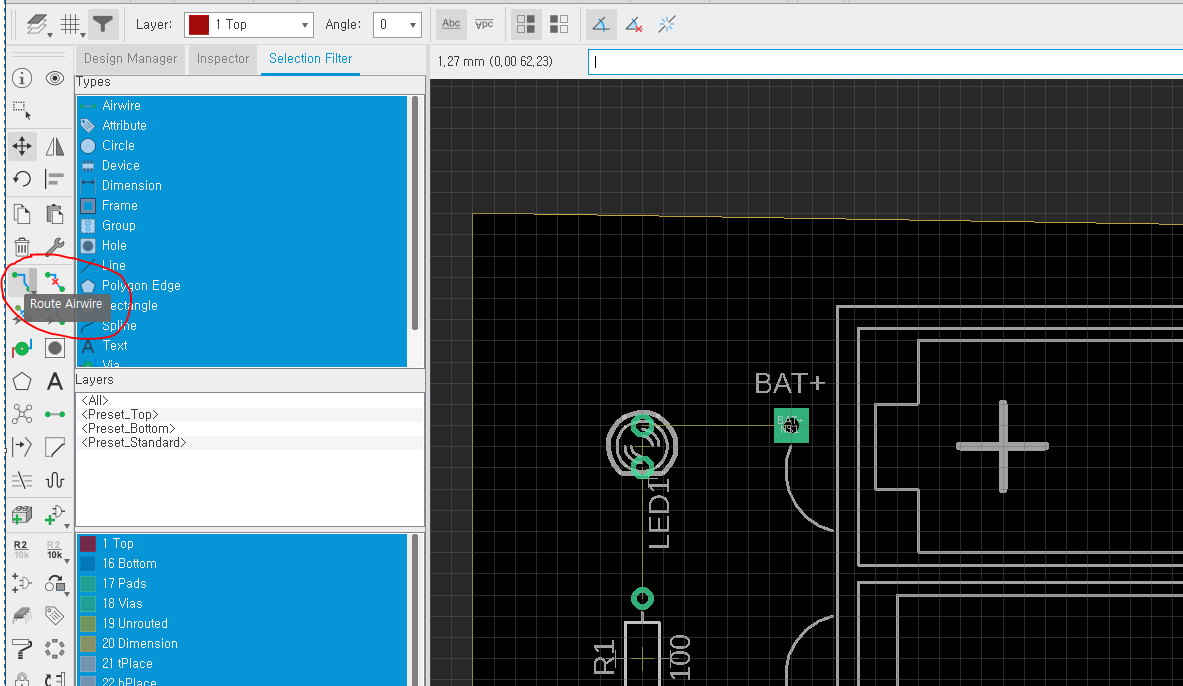
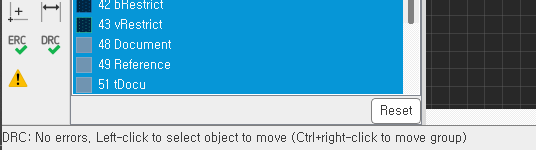
-> 파츠들을 다 이어주고 설계가 다 잘되었는지 DRC 확인해보자
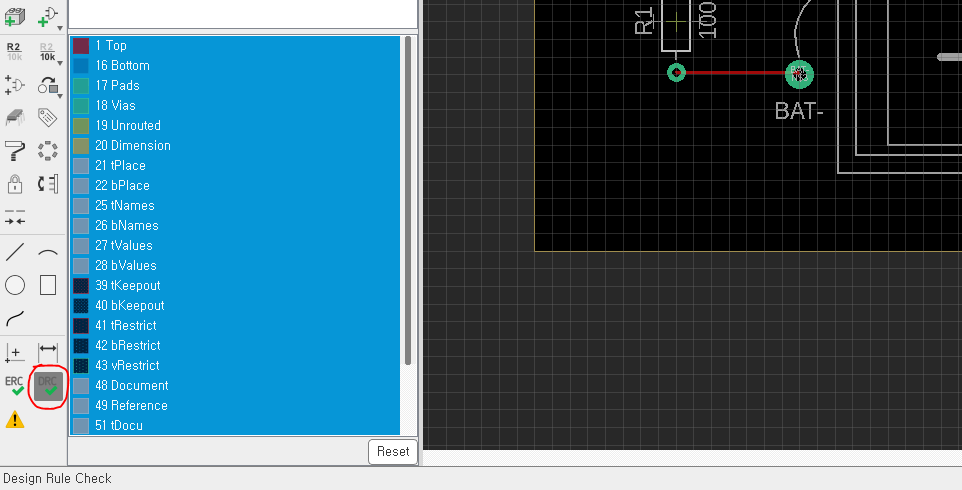
-> 그대로 체크
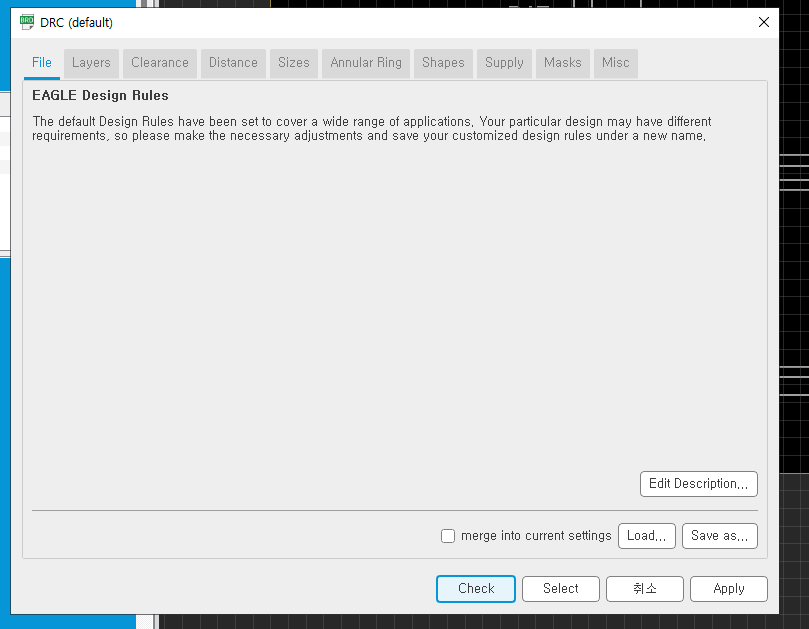
-> 에러가 없다고 한다.
- PCB 보드 완성
-> 이제 거버 파일 만들어야 함
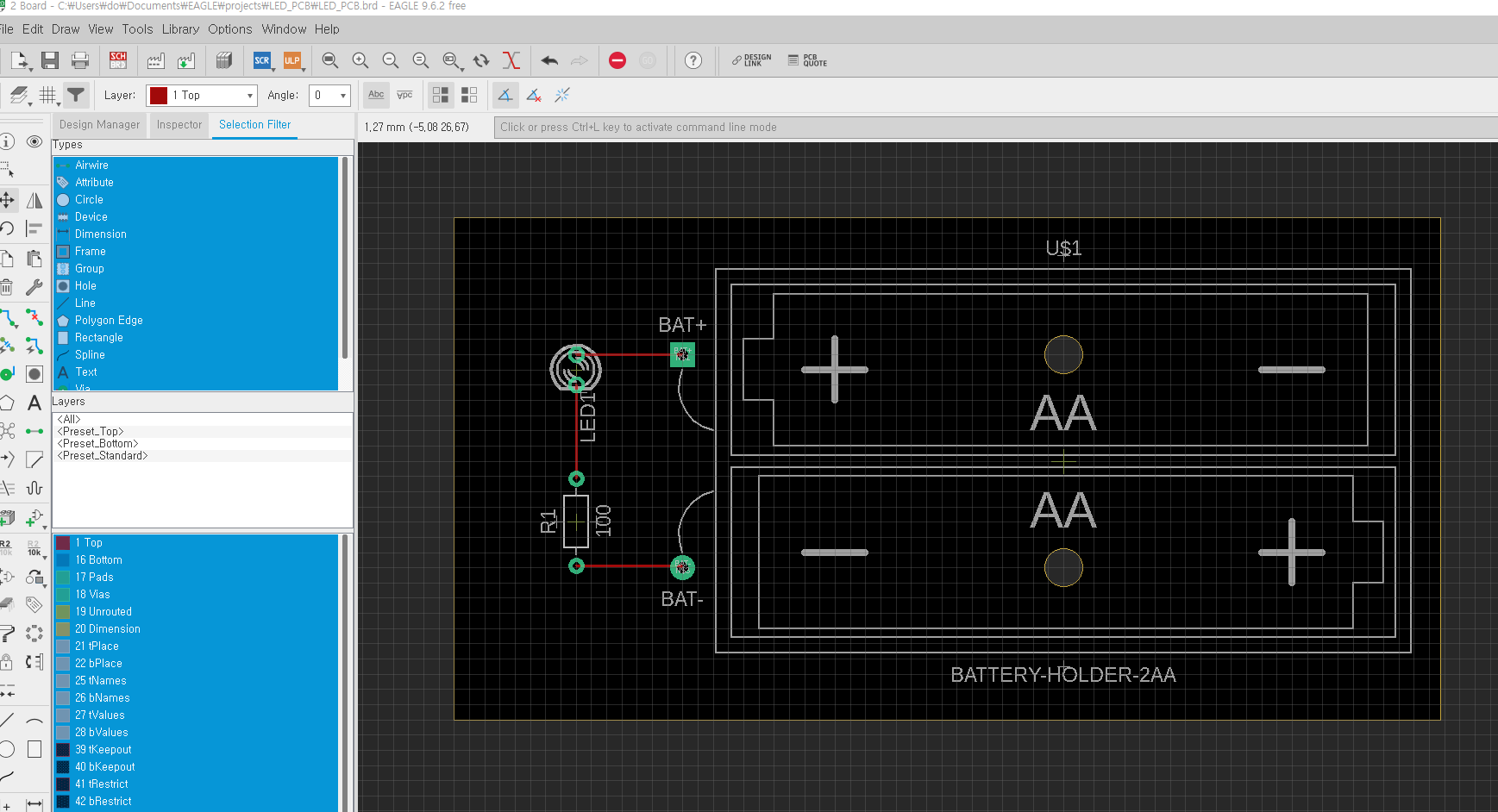
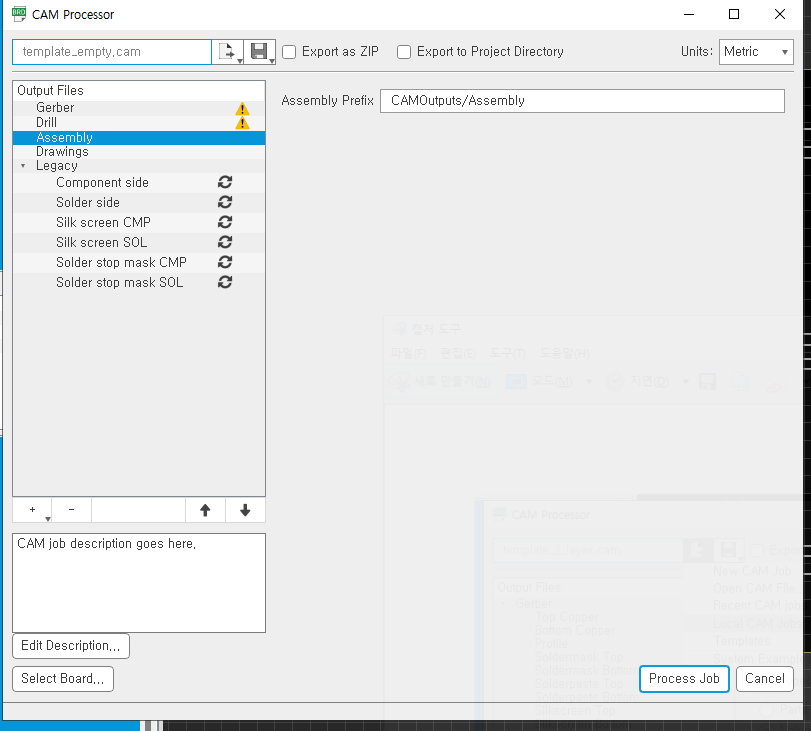
-> CAM Processor 클릭
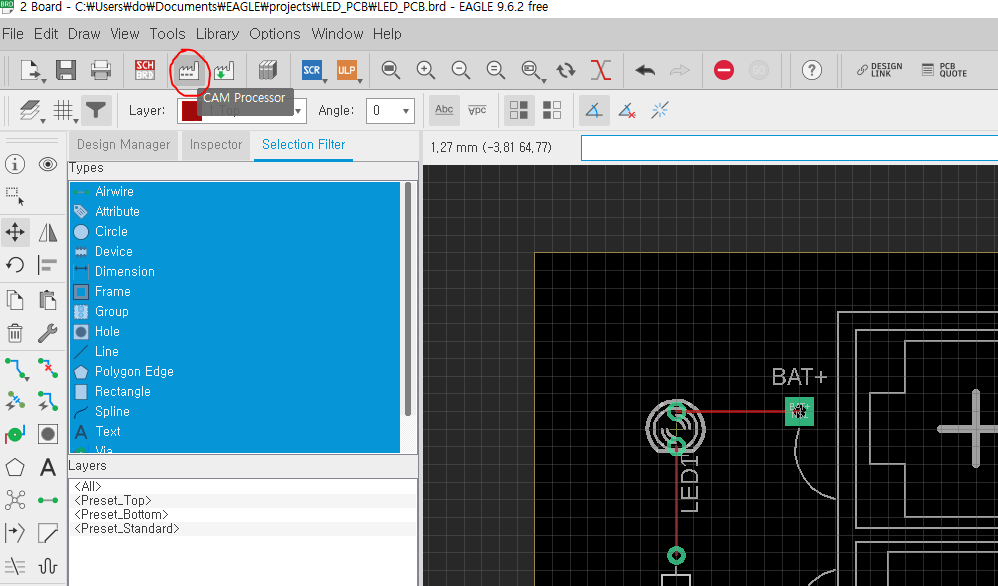
-> gerb274x.cam 클릭
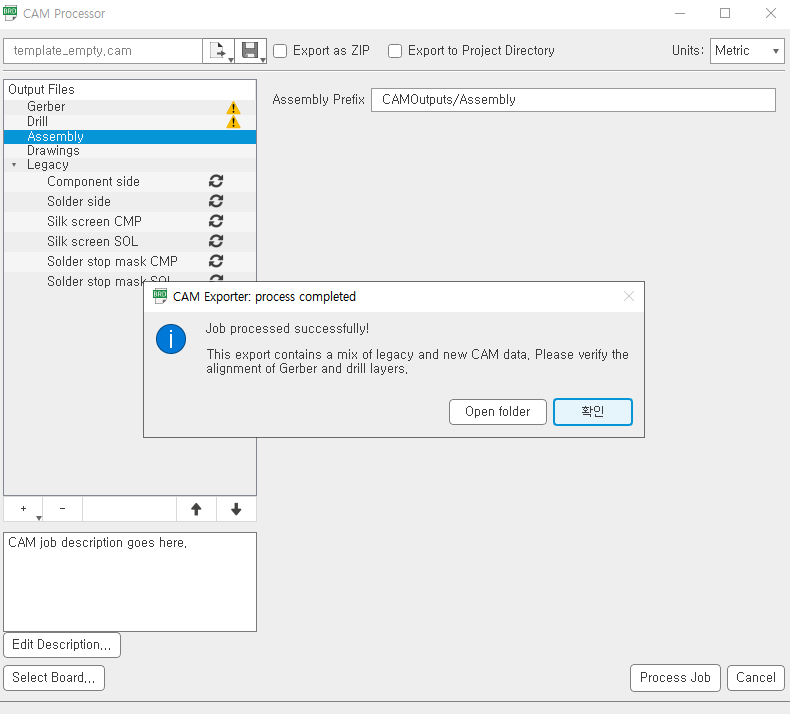
-> 프로세스 해주고
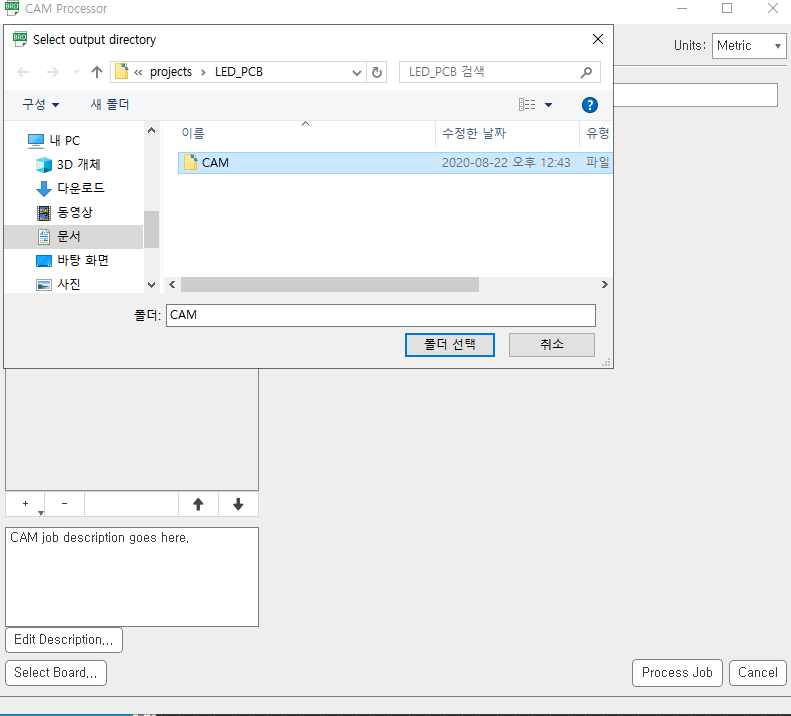
-> LED_PCB 폴더 안에 CAM 폴더를 새로 만들어서 지정
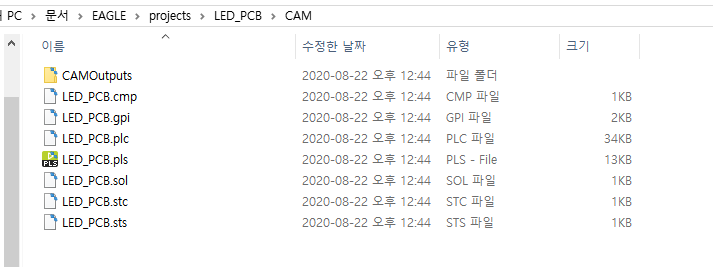
- 완성
'로봇 > 전기전자&메카' 카테고리의 다른 글
| 이글캐드 입문 - 4. LED Light Control PCB 설계 (0) | 2020.08.22 |
|---|---|
| 아두이노 PCB (0) | 2020.08.22 |
| 이글캐드 입문 - 2. LED PCB 설계(라이브러리 추가) (0) | 2020.08.22 |
| 프로토타이핑 - 22. 2020.08.20 보고서 (0) | 2020.08.20 |
| 이글캐드 입문 - 1. PCB, 이글캐드 기초 (0) | 2020.08.20 |